![]()
Práctica de laboratorio II
Análisis de la respuesta transitoria y estacionaria
PRÁCTICA DE LABORATORIO II
ANÁLISIS DE LA RESPUESTA TRANSITORIA Y ESTACIONARIA
1. OBJETIVO GENERAL
Lograr que el estudiante analice y diseñe sistemas de control, tanto de primero como de segundo orden, a partir de las características obtenidas de la respuesta transitoria y estacionaria ante diferentes entradas de prueba típicas.
2. OBJETIVOS ESPECÍFICOS
Desarrollar en el estudiante:
- La habilidad de diseñar y analizar sistemas de primero y segundo orden a partir de los parámetros que determinan su respuesta en el tiempo.
- La habilidad de crear, implementar y utilizar una aplicación computacional para el diseño de sistemas de control de primero y segundo orden.
- La habilidad de aplicar el análisis de la respuesta transitoria y estacionaria al sistema de control seleccionado en el Proyecto Integrador.
3. RESULTADOS DE APRENDIZAJE
- El estudiante debe tener la capacidad de interpretar la respuesta transitoria de un sistema ante diferentes entradas y caracterizar la respuesta temporal para sistemas de primero y segundo orden ante una entrada escalón unitario.
- Debe demostrar habilidad y conocimiento en el análisis e interpretación del error en estado estacionario para entradas tipo escalón, rampa y parábola.
4. INTRODUCCIÓN
Después de obtener el modelo matemático de un sistema de control, es necesario conocer cómo se comporta éste ante cambios en las señales que actúen sobre él, con el objetivo de analizar y conocer el desempeño de dichos sistemas. Posteriormente, basándose en el comportamiento deseado de un sistema de control, deben ajustarse los parámetros del sistema con el objetivo de proporcionar la respuesta deseada.
Las señales de prueba que normalmente se utilizan son funciones escalón, rampa, parábola, impulso, entre otras, ya que facilitan los análisis matemáticos y experimentales para el sistema de control. Estas señales de prueba representan funciones de tiempo que cambian de forma gradual (rampa), sistemas sujetos a perturbaciones repentinas (escalón) o sistemas sujetos a entradas de choque (impulso).
La respuesta en el tiempo de un sistema de control tiene una componente transitoria, forma en la que responde un sistema al pasar de un estado inicial a uno final, y una componente en estado estacionario, que determina cómo responde un sistema cuando el tiempo se hace muy grande. Por lo tanto, la respuesta del sistema c (t) viene dada por c (t) = ctr (t) + css (t), donde ctr (t) es la respuesta en estado transitorio y css (t) es la respuesta en estado estacionario.
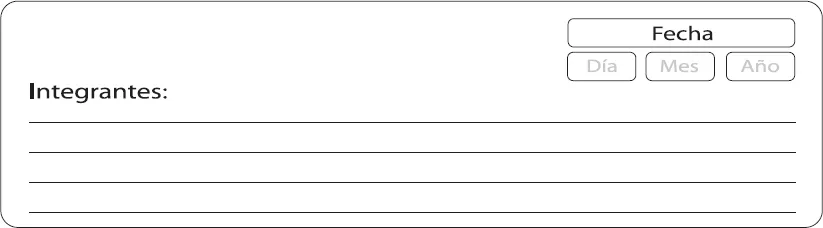
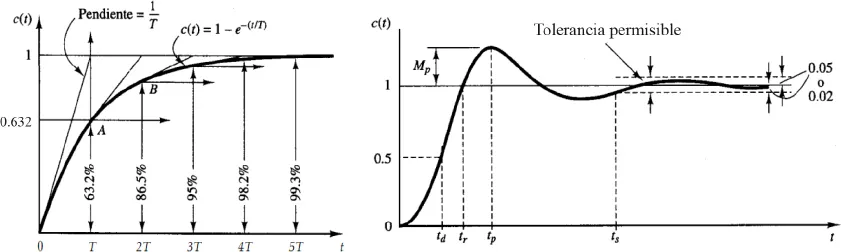
El objetivo primordial de este análisis en el tiempo es ser capaz de predecir el comportamiento dinámico del sistema. Las especificaciones de diseño para los sistemas de control normalmente incluyen varios índices de respuesta en el tiempo para determinada entrada. Por tanto, las especificaciones pocas veces constituyen un conjunto rígido de requisitos; más bien son un primer intento de proponer un comportamiento deseado [3]. De esta forma, se observa que ajustar la respuesta transitoria y de estado estacionario de un sistema de control es un resultado beneficioso para el diseño del mismo. La figura 2.1 muestra un ejemplo de la respuesta en el tiempo para sistemas de primero y segundo orden ante una entrada escalón unitario.
Figura 2.1. Respuesta para sistemas de primer y segundo orden ante una entrada escalón
Teniendo en cuenta lo anterior, en esta práctica de laboratorio se trabajarán las especificaciones más comunes en el dominio temporal, como lo es el porcentaje de sobreelongación, el tiempo de asentamiento, el tiempo pico, el tiempo de subida y el error de seguimiento en estado estacionario. Se utilizarán las señales de entrada antes mencionadas para poner a prueba la respuesta del sistema de control y se realizarán las comprobaciones utilizando MATLAB/SIMULINK.
Para el desarrollo de esta práctica de laboratorio se sugiere al estudiante, como gestor de su propio conocimiento, la revisión de los temas teóricos que se van a tratar a través de las siguientes lecturas:
- SMITH, Carlos A. and CORRIPIO, Armando B. Principles and Practice of Automatic Process Control, 3ª ed., United States of America, Wiley, 2006.
▶ Capítulo 3: Sistemas Dinámicos de Primer Orden
- OGATA, Katsuhiko. Ingeniería de Control Moderna, 4ª ed., Madrid, Pearson Educación, 2003.
▶ Capítulo 5: Análisis de la Respuesta Transitoria y Estacionaria
- DORF, Richard C. y BISHOP, Robert H. Sistemas de Control Moderno, 10ª ed., Madrid, Pearson Educación, 2005.
▶ Capítulo 4: Características de los Sistemas de Control Realimentado
- ENGELBERG, S. Tutorial 15: Control Theory, part I. IEEE Instrumentation & Measurement Magazine, vol. 11, Issue 3 (June, 2008), p. 34-40.
Nota: En la bibliografía adjunta se podrán encontrar otras referencias con información adicional de los temas tratados en este material.
5. PROCEDIMIENTO
5.1 Diseño y análisis de un sistema de primer orden
SOLUTRONICA LTDA es una empresa líder en el mercado nacional en cuanto a diseño electrónico se refiere. Actualmente, esta empresa tiene tres circuitos eléctricos para el control industrial que necesitan ser caracterizados teniendo en cuenta su respuesta en el tiempo para su diseño. El análisis de estos circuitos se ha delegado a cada grupo de laboratorio, los cuales deberán realizar las consignas solicitadas por la empresa solamente para el diseño que se le ha asignado. Cada uno de estos circuitos se puede modelar como un sistema de primer orden, como se explica a continuación:
5.1.1 PLL - Phase Loop Locked
Un PLL es un sistema de control que genera una señal que posee una relación fija con la fase de una señal de referencia. Su circuito responde tanto a la fase como a la frecuencia de la señal de entrada, produciendo automáticamente un aumento o una disminución en la frecuencia de un oscilador controlado por voltaje (VCO), hasta que este se ajuste a la frecuencia y fase de la señal de entrada. Un PLL es un ejemplo de un sistema de control utilizando retroalimentación negativa [6].
En términos más sencillos, un PLL compara las frecuencias de dos señales y produce una señal de error que es proporcional a la diferencia entre las frecuencias de entrada. La señal de error pasa a través de un filtro de paso bajas y se utiliza para alimentar un oscilador controlado por voltaje (VCO) que crea una frecuencia de salida. Esta frecuencia se compara con la entrada del sistema, lo cual produce un bucle de retroalimentación negativa [6].
En la figura 2.2 se puede observar el diagrama en bloques equivalente de un PLL básico l...