In the mid-eighteenth century, Swiss-born mathematician Leonhard Euler developed a formula so innovative and complex that it continues to inspire research, discussion, and even the occasional limerick. Dr. Euler's Fabulous Formula shares the fascinating story of this groundbreaking formula—long regarded as the gold standard for mathematical beauty—and shows why it still lies at the heart of complex number theory. In some ways a sequel to Nahin's An Imaginary Tale, this book examines the many applications of complex numbers alongside intriguing stories from the history of mathematics. Dr. Euler's Fabulous Formula is accessible to any reader familiar with calculus and differential equations, and promises to inspire mathematicians for years to come.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
Many years ago a distinguished mathematician wrote the following words, words that may strike some readers as somewhat surprising:
I met a man recently who told me that, so far from believing in the square root of minus one, he did not even believe in minus one. This is at any rate a consistent attitude. There are certainly many people who regard
as something perfectly obvious, but jib at
. This is because they think they can visualize the former as something in physical space, but not the latter. Actually
is a much simpler concept.1
I say these words are “somewhat surprising” because I spent a fair amount of space in An Imaginary Tale documenting the confusion about
that was common among many very intelligent thinkers from past centuries.
It isn’t hard to appreciate what bothered the pioneer thinkers on the question of
. In the realm of the ordinary real numbers, every positive number has two real square roots (and zero has one). A negative real number, however, has no real square roots. To have a solution for the equation x2 + 1 = 0, for example, we have to “go outside” the realm of the real numbers and into the expanded realm of the complex numbers. It was the need for this expansion that was the intellectual roadblock, for so long, to understanding what it means to say i =
“solves” x2 + 1 = 0. We can completely sidestep this expansion,2 however, if we approach the problem from an entirely new (indeed, an unobvious) direction.
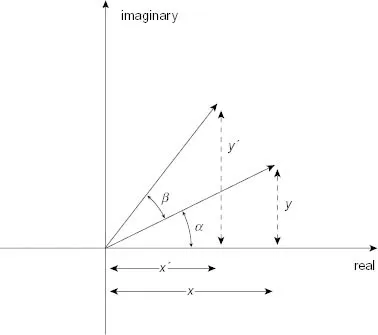
Figure 1.1.1. A rotated vector
A branch of mathematics called matrix theory, developed since 1850, formally illustrates (I think) what the above writer may have had in mind. In figure 1.1.1 we see the vector of the complex number x + iy, which makes angle α with the positive real axis, rotated counterclockwise through the additional angle of β to give the vector of the complex number x′ + iy′. Both vectors have the same length r, of course, and so
. From the figure we can immediately write x = r cos(α) and y = r sin(α), and so, using the addition formulas for the sine and cosine
Now, focus on the x′, y′ equations and replace r cos(α) and r sin(α) with x and y, respectively. Then,
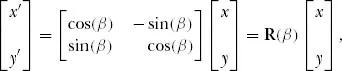
Writing this pair of equations in what is called column vector/matrix notation, we have
where R(β) is the so-called two-dimensional matrix rotation operator (we’ll encounter a different sort of operator—the differentiation operator—in chapter 3 when we prove the irrationality of π2). That is, the column vector
, when operated on (i.e., when multiplied3) by R (β), is rotated counterclockwise through the angle β into the column vector
.
Since β = 90° is the CCW rotation that results from multiplying x + iy by i, this would seem to say that i =
can be associated with the 2 × 2 matrix R (90°)
Does this mean that we might, with merit, call this the imaginary matrix? To see that this actually makes sense, indeed that it makes a lot of sense, recall the 2 × 2 identity matrix
which has the property that, if A is any 2 × 2 matrix, then AI = IA = A. That is, I plays the same role in matrix arithmetic as does 1 in the arithmetic of the realm of the ordinary real numbers. In that realm, of course, i2 = − 1, and the “mystery” of
is that it itself is not (as mentioned earlier) in the realm of the ordinary real numbers. In the realm of 2 × 2 matrices, however, there is no such “mystery” because the square of the “imaginary matrix” (a perfectly respectable 2 × 2 matrix) is
That is, unlike the ordinary real numbers, the realm of 2 × 2 matrices does have a member whose square is equal to the negative of the 2 × 2 matrix that plays the role of unity.
To carry the analogy with the ordinary real numbers just a bit further, the zero 2 × 2 matrix is
, since any 2 × 2 matrix multiplied by 0 gives 0. In addition, just as (1/a) ·...
Table of contents
Cover
Half title
Title
Copyright
Dedication
Contents
Preface to the Paperback Edition
What This Book Is About, What You Need to Know to Read It, and WHY You Should Read It
Preface
Introduction
Chapter 1. Complex Numbers (an assortment of essays beyond the elementary involving complex numbers)
Chapter 2. Vector Trips (some complex plane problems in which direction matters)
Chapter 3. The Irrationality of π2 (“higher” math at the sophomore level)
Chapter 4. Fourier Series (named after Fourier but Euler was there first——but he was, alas, partially WRONG!)
Chapter 5, Fourier Integrals (what happens as the period of a periodic function becomes infinite, and other neat stuff)
Chapter 6, Electronics and −1 (technological applications of complex numbers that Euler, who was a practical fellow himself, would have loved)
Euler: The Man and the Mathematical Physicist
Notes
Acknowledgments
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Dr. Euler's Fabulous Formula by Paul Nahin,Paul J. Nahin in PDF and/or ePUB format, as well as other popular books in Mathematics & Applied Mathematics. We have over one million books available in our catalogue for you to explore.