![]()
1 Einführung
Modellflug ist seit Jahrzehnten ein Hobby für sehr viele Menschen. Bisher wurden hauptsächlich Flugzeuge und klassische Hubschrauber verwendet. Seit einigen Jahren erfreuen sich aber auch Multicopter wachsender Beliebtheit.
Für die starke Verbreitung gibt es verschiedene Gründe. Gegenüber klassischen Hubschraubern sind Multicopter einfacher zu bauen und zu fliegen. Eine Voraussetzung dafür war, dass Mikrocontroller-Anwendungen für versierte Bastler zum Kinderspiel wurden. Modulare Mikrocontroller-Plattformen wie Arduino (http://arduino.cc) erlauben es heute auch Nicht-Elektronikern, in wenigen Stunden Schaltungen zu bauen, die vor zwanzig Jahren nur ein studierter Elektroniker in wochenlanger Arbeit hätte entwickeln können.
Andere Voraussetzungen waren der Einzug hocheffizienter Motoren als Massenware und die Verfügbarkeit computergesteuerter Maschinen, wie CNC-Fräsen und neuerdings auch 3D-Drucker. Wichtig war darüber hinaus die Einführung der 2,4-GHz-Fernsteuerungsanlagen.
Technik und Steuerungen sind heute so ausgereift, dass Multicopter in vielen Bereichen professionell genutzt werden. Dabei ist die Idee des Multicopters nicht neu. In der bemannten Luftfahrt gab es bereits Anfang des zwanzigsten Jahrhunderts flugfähige Multicopter.
In diesem Kapitel erfahren Sie, was Multicopter sind und wozu sie verwendet werden können.
1.1 An wen richtet sich dieses Buch?
Multicopter sind zweifellos hochkomplexe Geräte. Für den Bau von Multicoptern ist ein gutes Verständnis der benötigten Werkzeuge, Materialien, Komponenten und deren Zusammenspiel eine notwendige Voraussetzung. Wer einen Multicopter selbst baut, beschäftigt sich zwangsläufig auch mit Mechanik, Statik, Elektronik und Software.
Dieses Buch vermittelt viel Wissen über die Funktionsweise aller Komponenten von Multicoptern. Es erklärt, wie diese Komponenten zusammenarbeiten und wie festgestellt werden kann, welche Komponenten zusammenpassen. Anhand von Bauprojekten wird im Detail hergeleitet, wie Multicopter konzipiert und dazu passende Komponenten ermittelt werden. Der Leser erfährt, welche Werkzeuge, Maschinen und Materialien eingesetzt werden können. Auch die Themen Recht und Sicherheit werden eingehend behandelt.
Wie Werkzeuge richtig benutzt werden und wie Materialien korrekt und sicher bearbeitet werden, geht über den Umfang eines solchen Buchs aber deutlich hinaus. Ohne gute handwerkliche Fähigkeiten und ohne die Bereitschaft, sich auch teilweise über das Buch hinaus mit dem Thema zu beschäftigen, ist dieses Buch für Sie nicht geeignet, um einen Multicopter selbst zu bauen.
Wenn Sie das handwerkliche Geschick bereits mitbringen, vor Lötkolben und Dremel nicht zurückschrecken und bereit sind, sich in die Thematik einzuarbeiten, oder bereits Erfahrungen mit Multicoptern haben, dann ist dieses Buch genau der richtige Einstieg, um eigene Modelle jeglicher Art zu entwickeln. Dabei geht es nicht ausschließlich um den Bau eigener Multicopter, sondern auch generell um das Verständnis, wie diese funktionieren. Auch wenn Sie fertige Multicopter verwenden, finden Sie hier viele wichtige Informationen – beispielsweise, wenn Sie diese selbst reparieren wollen.
1.2 Was sind Multicopter?
Multicopter ist ein Kunstwort für Multi-Rotor-Helikopter. Multi bedeutet »mehrere« und bezieht sich hier auf die Anzahl der Rotoren. Das Wort Helikopter stammt aus dem Griechischen und bedeutet sinngemäß Drehflügler. Eine andere Bezeichnung für Helikopter ist Hubschrauber. Multicopter gehören demnach zur Familie der Hubschrauber und haben mehrere Rotoren. Im Englischen werden Multicopter auch Multirotor genannt.
Obwohl Rotor bei Hubschraubern die richtige Bezeichnung ist, wird umgangssprachlich im Modellflug meist der Begriff Propeller verwendet. Wenn Sie in Modellbaugeschäften nach Rotoren für Multicopter suchen, werden Sie diese nur selten unter diesem Namen finden. In diesem Buch wird daher auch meist die Bezeichnung Propeller verwendet.
Abb. 1–1 Quadrocopter im Flug
Hubschrauber sind per Definition senkrecht startende Fluggeräte mit einem oder mehreren Rotoren zur Erzeugung von Auftrieb. Der Unterschied zu Flugzeugen ist nicht etwa, dass die eine Fraktion Tragflächen hat und die andere nicht. Tragflächen haben beide. Nur rotieren diese beim Hubschrauber, um eine entsprechende Strömungsgeschwindigkeit der Luft zu erreichen.
Flugzeuge müssen diese Geschwindigkeit als Ganzes erreichen. Deshalb kann ein Hubschrauber in der Luft stehen, ein Flugzeug aber nicht. Die Grundlage für die Flugfähigkeit bei Hubschraubern und Flugzeugen ist der dynamische Auftrieb. Das grundlegende Prinzip besteht darin, durch unterschiedliche Luftströmungen einen Druckunterschied und damit eine gerichtete Kraft zu erzeugen. Das wird durch die Form der Tragflächen erreicht.
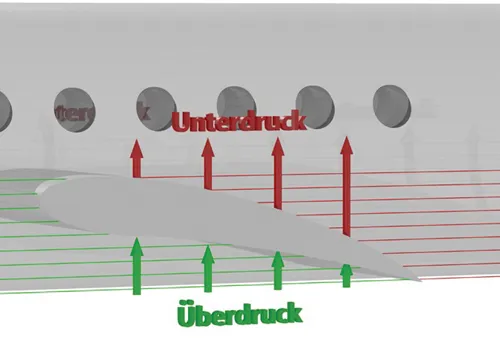
Eine Tragfläche ist so konstruiert, dass sich die Anströmung, also die auftreffende Luft, unter der Tragfläche staut. Im geschützten Bereich oberhalb der Tragfläche, der nicht direkt vom Luftstrom erreicht wird, entsteht ein Unterdruck.
Abb. 1–2 Dynamischer Auftrieb an einer Tragfläche
Die Luft wird gezwungen, den längeren Weg an der Oberseite schneller zurückzulegen, während diese im unteren Teil gebremst wird. Da sich zwei unterschiedliche Drücke immer ausgleichen wollen, wird so eine nach oben wirkende Kraft erzeugt. Ist diese Kraft groß genug, kann sie die Gewichtskraft eines Luftfahrzeugs überwinden.
Wenn ein Multicopter ein Hubschrauber ist, wieso verwenden wir dann nicht einen klassischen Hubschrauber mit einem Hauptrotor und Heckrotor, werden Sie sich vielleicht fragen. So würden doch weniger Motoren und weniger Propeller benötigt. Eine Antwort auf diese Frage lautet, dass bei einem Multicopter dadurch die Komplexität erheblich reduziert wird. Gleichzeitig steigt auch noch die Flugstabilität.
Ein Hubschrauber mit nur einem Hauptrotor erzeugt zunächst nur in zwei Richtungen Kräfte: eine nach oben gerichtete Kraft in Richtung der Rotorachse und eine Rotationskraft um die Rotorachse. Der Kraft nach oben wirkt die Gewichtskraft des Hubschraubers entgegen, der Rotationskraft lediglich die Massenträgheit. So könnte der Hubschrauber nicht vernünftig fliegen. Er könnte zwar steigen und sinken, würde sich dabei aber um die Rotorachse drehen. Damit das nicht geschieht, gibt es den Heckrotor, der die Rotationskraft kompensiert.
Es gibt auch andere Lösungen, wie Koaxial-Rotoren. Hier drehen sich zwei Rotoren an einer Achse entgegengesetzt. So entstehen zwei entgegengesetzte Rotationskräfte, die sich aufheben. Durch Ändern der Schubkraft des Heckrotors kann ein Hubschrauber gezielt um die Rotorachse gedreht werden. Bei einem Koaxial-Rotor muss dazu der Schub eines Rotors größer als der des anderen werden. Eine weitere Variante anstelle des Heckrotors ist ein seitlicher Schubstrahl, der aus dem Abgasstrom der Turbine für den Hauptrotor erzeugt wird.
Allein mit der nach oben gerichteten Kraft könnte ein Hubschrauber sich aber nur vertikal bewegen. Horizontale Bewegungen wären damit nicht möglich. Horizontale Bewegungen werden bei Hubschraubern über eine Konstruktion erreicht, die sich Taumelscheibe nennt. Eine Taumelscheibe ist eine komplizierte Konstruktion aus Lagern, Hebeln und Gestängen. Mit ihr kann der Anstellwinkel der Rotorblätter verändert werden. Durch Änderung des Anstellwinkels ändert sich die Schubkraft. Ändert sich der Anstellwinkel für alle Rotorblätter gleichermaßen, so ändert sich die Schubkraft in Richtung der Rotorachse. Damit wird der Auf- und Abstieg kontrolliert.
Abb. 1–3 Hebel, Gestänge, Lager: Alles zusammen bildet die Taumelscheibe.
Um eine horizontale Kraft zu erzeugen, darf die Rotorachse nicht mehr senkrecht stehen, sondern muss in die Richtung gekippt sein, in die der Hubschrauber sich bewegen soll. Um die Rotorachse zu kippen, wird eine entsprechende Kraft benötigt. Die Taumelscheibe erzeugt diese Kraft, indem sie die Anstellwinkel der Rotorblätter nur in einem Teil des Rotorkreises ändert. Wenn ein Rotorblatt diesen Abschnitt erreicht, wird der Anstellwinkel geändert und beim Verlassen wieder zurückgestellt. Das bewirkt, dass der Schub in diesem Abschnitt anders als im Rest des Rotationskreises ist. Dadurch kippt der gesamte Hubschrauber.
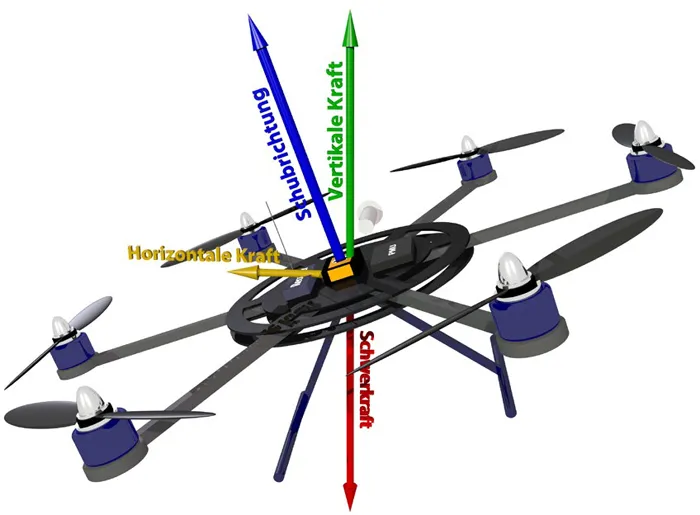
Die Rotorachse steht dann nicht mehr senkrecht und die Auftriebskraft wirkt schräg nach oben. Aus dem Physikunterricht ist Ihnen vielleicht noch bekannt, dass jede Kraft in vertikal und horizontal wirkende Kräfte zerlegt werden kann. Würde die Rotorachse um neunzig Grad gekippt, würde das aus dem Hubschrauber ein Flugzeug machen. Aufgrund fehlender Tragflächen würde dieses aber abstürzen, da es keine nach oben wirkende Kraft mehr gäbe. Wenn die vertikale Kraft das Gewicht des Hubschraubers ausgleicht, führt effektiv nur noch die horizontale Kraft zu einer Bewegung. Der Hubschrauber fliegt auf diese Weise parallel zum Boden.
Abb. 1–4 Verteilung der Kräfte bei horizontaler Bewegung
Ein Multicopter fliegt nach demselben Prinzip. Es gibt zwar auch Multicopter, die Taumelscheiben verwenden, das ist jedoch nur sehr selten der Fall. Gerade der Verzicht auf die Komplexität der Taumelscheibe erlaubt dem Modellbauer, Multicopter mit verhältnismäßig einfachen Mitteln selbst zu bauen. Damit ein Multicopter sich horizontal bewegen kann, muss er genau so kippen können wie ein Hubschrauber mit nur einem Rotor mit einer Taumelscheibe. Dazu werden um den Schwerpunkt des Hubschraubers mehrere Propeller angeordnet, die separat gesteuert werden können.
Drehen alle Propeller gleich schnell, wirkt die Summe der Kräfte nach oben. Dreht ein Rotor schneller, hebt er den Hubschrauber an dieser Stelle an. Das entspricht dem Prinzip der Taumelscheibe. So entfällt die komplizierte Taumelscheibe und auch gleich der gesamte Rotorkopf. Ein Multicopter kann dadurch mit starren Propellern aufgebaut werden.
Damit ergibt sich aber noch ein Unterschied zum Rotor mit Taumelscheibe. Bei einem Rotor mit Taumelscheibe kann der Rotor mit konstant...