Sensorik, die Wissenschaft des Messens von Zustand und Veränderung technischer Systeme, spielt eine zentrale Rolle in diesen Systemen, so zum Beispiel in eingebetteten Systemen oder Automatisierungssystemen. Daher sind grundlegende Kenntnisse der Sensorik für Ingenieure jeglicher Fachrichtung unerlässlich. Aufbauend auf den generellen Grundlagen von Sensoren werden die grundlegenden physikalischen Effekte, die in der Sensorik genutzt werden, behandelt. Anschließend wird die Verwendung dieser Effekte zur Sensorik von technischen und physikalischen Größen anhand von Sensorausführungen vermittelt. Die Sensorausführungen werden zusätzlich durch zahlreiche konkrete Praxisbeispiele von realen Sensoren und deren Datenblättern verdeutlicht und vertieft. Die Anbindung der Sensoren an informationsverarbeitende Systeme wie Mikrocontroller geschieht mittels Sensorschnittstellen. Unterschiedliche Realisierungsmöglichkeiten dieser Schnittstellen werden vorgestellt und im Hinblick auf Einsatzmöglichkeiten diskutiert. Abgerundet wird das Buch durch eine kurze Darstellung von wichtigen informationsverarbeitenden Systemen wie Mikrocontrollern oder speicherprogrammierbaren Steuerungen.
375,005 Studierende vertrauen auf uns
Zugang zu über 1 Million Titeln zu einem fairen monatlichen Preis.
Mit unseren Lerntools kannst du noch effizienter lernen.
Moderne mechatronische Systeme kombinieren zahlreiche ingenieurwissenschaftliche Disziplinen wie Elektrotechnik, Mechanik und Software-Engineering, um komplexe Funktionalitäten zu realisieren. Dabei sind diese Systeme häu g nicht isoliert und einzeln zu betrachten sondern interagieren mit der Umwelt und anderen Systmen. Die Auswirkungen der Interaktion, also die Beein ussung des Systems selbst, anderer Systeme und der Umwelt durch das System müssen gemessen werden, um Rückschlüsse auf das Verhalten des mechatronischen Systems ziehen zu können. Daher spielt die Sensorik, die Wissenschaft des Messens von Zustand und Veränderung von technischen Systemen, eine zentrale Rolle für mechatronische Systeme.
Nach dem Messen der relevanten Parameter eines Systems mittels geeigneter Sensoren und, je nach Bedarf bzw. Notwendigkeit, der Aufbereitung der Messdaten bereits im Sensor müssen die Daten an informationsverarbeitende Systeme, z.B. Mikrocontroller oder Prozessoren, übertragen werden. Diese Datenübertragung kann, je nach Anwendungsfall und Anforderung des Systems, mittels einfacher Sensorschnittstellen oder über komplexere Bussysteme geschehen. Daher stellen Sensorschnittstellen, digital oder analog, wesentliche Eigenschaften von Sensoren dar, um sie in einer Anwendung einsetzen zu können.
Das Buch gliedert sich daher in drei große Abschnitte: die beiden großen Teile Sensoren und Sensorschnittstellen sowie, als kürzere Ergänzung, informationsverarbeitende Systeme.
Der Abschnitt über Sensoren beginnt mit den Grundlagen der Sensorik und einer kurzen Einführung in generelle Themen wie messtechnische Begri e, Signalaufbereitung und Mikrosystemtechnik. Anschließend werden physikalische Messprinzipien als Grundlagen für die technische Realisierung von Sensoren eingeführt. Aufbauend auf diesen Prinzipien werden Sensoren für zahlreiche Messgrößen und ihre Funktionsweise dargestellt. Dabei wird durch die Vorstellung realer Sensoren und die Verwendung der entsprechenden Datenblätter der realen Sensoren der direkte Bezug zur Praxis hergestellt. Die Verweise auf die verwendeten Datenblätter sind in der Literatur aufgeführt.
Anschließend werden informationsverarbeitende Systeme als zentrale Logikeinheiten kurz und einführend vorgestellt. Neben ihrer Aufgabe als Recheneinheit zur Abarbeitung eines applikationsspezi schen Programms kommunizieren sie über entsprechende Schnittstellen und Bussysteme mit den Sensoren und mit anderen Logikeinheiten. Anhand der Beispiele Mikrocontroller und speicherprogrammierbare Steuerung werden die sensor- und busspezi schen Eigenschaften dieser Komponenten dargestellt.
Das Kapitel über Sensorschnittstellen beginnt mit der Darstellung von analogen Schnittstellen zur Messdatenübertragung. Das Thema digitale Schnittstellen wird anschließend behandelt. Dabei wird zunächst allgemein auf die digitale Kommunikation in Form von Bussystemen wie CAN oder Ethernet eingegangen, da bei den digitalen Sensorschnittstellen viele Grundkonzepte von Bussystemen Anwendung nden. Zudem werden Bussysteme vermehrt als digitale Sensorschnittstellen für intelligente Sensoren eingesetzt, auch um die Sensoren einfacher in komplexe vernetzte Systeme einbinden zu können.
Begleitend zu den theoretischen Ausführungen sind Übungen zu den jeweiligen Themen sowie deren Lösungen am Ende des Buchs integriert.
2 Grundlagen der Sensorik
2.1 Einführung
Sowohl Lebewesen als auch technische Systeme müssen generell relevante Größen von Systemen, sei es von sich selbst oder ihrer Umgebung, erfassen und verarbeiten können. Dazu werden diese Größen, z.B. physikalische, chemische oder elektrische, mit Hilfe von geeigneten Sensoren quantitativ und qualitativ gemessen.
So bilden die 5 Sinne des Menschen die grundlegende Sensorik, die er zur Wahrnehmung zur Verfügung hat:
– Sehen (optischer Sensor)
– Riechen (chemischer Sensor)
– Hören (akustischer Sensor)
– Schmecken (chemischer Sensor)
– Fühlen (taktiler Sensor)
Der Mensch kann also in gewissem Rahmen optische, chemische und mechanische Größen erfassen. Dabei ist der wahrnehmbare Wertebereich der jeweiligen Größe eingeschränkt. So können Hunde wesentlich höhere Frequenzen hören als Menschen. Für andere Größen wie magnetische Felder oder Radioaktivität fehlen die entsprechenden Sensoren dem Menschen komplett, die aber eventuell von anderen Lebewesen erfasst werden können. Zugvögel können zum Beispiel das Magnetfeld der Erde detektieren und Fledermäuse mittels Ultraschall navigieren.
Am Beispiel der menschlichen Sinne können schon einige grundlegende Eigenschaften der Sensorik dargestellt werden:
– Die Sensoren werden durch Auflösung und Messbereich charakterisiert (welche Tonhöhen bzw. Frequenzen kann das Gehör unterscheiden)
– Der Messbereich ist in der Regel beschränkt (der für den Menschen sichtbare Bereich ist nur ein sehr kleiner Aus-schnitt des elektromagnetischen Spektrums)
– Die maximalen Belastungen sind begrenzt (zu große Lichtintensität zerstört die Sehnerven)
– Die zu messende primäre Größe wird in ein elektrisches Signal umgewandelt (beim Menschen die elektrischen Impulse der Nervenbahnen)
– Das elektrische Signal wird zu einer Verarbeitungseinheit übertragen (über die Nervenbahnen zum Gehirn)
– Die Ergebnisse mehrerer Sensoren werden gemeinsam ausgewertet (Sensorfusion, z.B. Kombination von Geruchs- und Geschmackssinn zur Erfassung des Geschmacks)
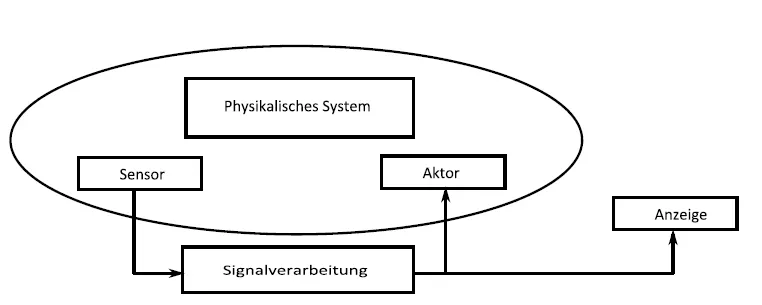
Die technische Sensorik bezeichnet im Allgemeinen die Verwendung von Sensoren zum Messen von dedizierten Größen. D.h. bei Sensoren handelt es sich technisch gesehen um Messfühler oder Messwertaufnehmer. Gemäß Abbildung 2.1 stellt der Sensor das Bindeglied zwischen dem zu beobachtenden System und der Informationsverarbeitung dar. Im dargestellten Beispiel in Abbildung 2.1 ist der Sensor Teil eines Regelungssystems, bei dem durch die Auswertung der Sensorinformationen Aktoren angesteuert werden, die auf das System zurückwirken.
Abb. 2.1. Sensoren als Teil eines regelungstechnischen Systems
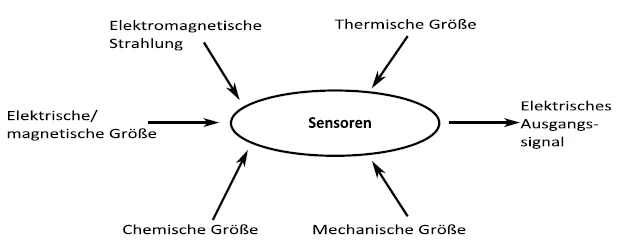
Grundaufgabe eines Sensors ist die Umwandlung einer technischen Größe, der Messgröße, in eine elektrische Ausgangsgröße. Dazu nutzt der Sensor bestimmte physikalische Effekte für die Wandlung in eine elektrische Größe. Gegebenenfalls verarbeitet der Sensor die elektrische Größe auch direkt. Beispiele für typische technische Größen, die gewandelt werden sollen, sind in Abbildung 2.2 und Tabelle 2.1 dargestellt.
Abb. 2.2. Technische Messgrößen
Tab. 2.1. Beispiele für technische Messgrößen
Kategorie
Messgröße
Mechanisch
Geometrisch
Abstand, Winkel, Weg, Neigung
Kinematisch
Geschwindigkeit, Beschleunigung, Drehzahl
Beanspruchung
Kraft, Druck, Drehmoment
Material
Masse, Dichte
Thermisch
Temperatur
Elektrisch/Magnetisch
Feld
Magnetisches Feld, elektrisches Feld
Zustandsgröße
Spannung, Strom, elektrische Leistung
Parameter
Widerstand, Kapazität, Induktivität
Chemisch/Physikalisch
Konzentration
pH-Wert, Feuchtigkeit
Optisch
Intensität, Farbe
2.2 Messtechnische Begriffe
Wie bereits weiter oben aufgeführt handelt es sich bei Sensoren um Messgeräte, die in der Regel nicht-elektrische Messgrößen in elektrische Größen umwandeln. Da das Messen die zentrale Aufgabe von Sensoren ist sollen im Folgenden kurz einige messtechnische Begriffe wiederholt werden
– Wahrer Wert xw:
Eindeutig existierender Wert der Messgröße, i.d.R. nicht erfassbar
– Messen:
Experimenteller Vorgang zur Bestimmung des Werts einer Größe als Vielfaches einer Einheit oder eines Bezugswertes.
– Messgröße:
Größe oder Eigenschaft, die durch Messen bestimmt werden soll
– Messwert xi:
Spezieller, gemessener Wert einer Messgröße, bestehend aus Zahlenwert und Einheit (bzw. Bezugswert)
– Messabweichung:
Differenz zwischen wahrem Wert und Messwert (positiv oder negativ)
– Absolut: e = xi - xw
– Relativ:
– Messunsicherheit:
Intervall um den Messwert, in dem der wahre Wert xw liegt (immer mit ± Angabe, relativ oder absolut)
– Messergebnis:
Ein um eine Qualitätsangabe ergänzter Messwert (z.B. Messunsicherheit)
Jede Messung unterliegt einer Messabweichung, so dass das Messergebnis immer eine Qualitätsangabe umfasst. Dabei ist zwischen zufälligen und systematischen Messabweichungen zu unterscheiden, wobei sich die gesamte Messabweichung aus der Summe von zufälligen und systematischen Messabweichungen zusammensetzt.
Zufällige Messabweichungen streuen sowohl vom Betrag als auch vom Vorzeichen um den Mittelwert. Der Einfluss dieser Zufallsfehler kann durch mehrmaliges Messen (n-mal) und anschließende Mittelung reduziert werden:
Gründe für Zufallsfehler sind z.B.:
– Rückwirkung durch das Messgerät auf das Messobjekt bzw. die Messgröße
– Umwelteinflüsse auf Messgröße/-objekt und Messgerät
– Nicht-ideales Messgerät
Systematische Messabweichungen dagegen heben sich auch bei wiederholten Messungen im Mittel nicht auf, sie haben einen kontanten Betrag und unterliegen keiner zeitlichen Veränderung. Damit sind systematische Messabweichungen nicht durch wiede...
Inhaltsverzeichnis
Cover
Titel
Impressum
Inhalt
1 Einleitung
2 Grundlagen der Sensorik
3 Physikalische Messprinzipien
4 Sensoren
5 Informationsverarbeitende Systeme
6 Sensorschnittstellen
7 Übungen und Lösungen
Datenblätter und Spezifikationen
Literatur
Stichwortverzeichnis
Fußnoten
Häufig gestellte Fragen
Ja, du kannst dein Abo jederzeit über den Tab Abo in deinen Kontoeinstellungen auf der Perlego-Website kündigen. Dein Abo bleibt bis zum Ende deines aktuellen Abrechnungszeitraums aktiv. Erfahre, wie du dein Abo kündigen kannst
Nein, Bücher können nicht als externe Dateien, z. B. PDFs, zur Verwendung außerhalb von Perlego heruntergeladen werden. Du kannst jedoch Bücher in der Perlego-App herunterladen, um sie offline auf deinem Smartphone oder Tablet zu lesen. Erfahre, wie du Bücher herunterladen kannst, um sie offline zu lesen
Perlego bietet zwei Abopläne an: Elementar und Erweitert
Elementar ist ideal für Lernende und Profis, die sich mit einer Vielzahl von Themen beschäftigen möchten. Erhalte Zugang zur Basic-Bibliothek mit über 800.000 vertrauenswürdigen Titeln und Bestsellern in den Bereichen Wirtschaft, persönliche Weiterentwicklung und Geisteswissenschaften. Enthält unbegrenzte Lesezeit und die Standardstimme für die Funktion „Vorlesen“.
Pro: Perfekt für fortgeschrittene Lernende und Forscher, die einen vollständigen, uneingeschränkten Zugang benötigen. Schalte über 1,4 Millionen Bücher zu Hunderten von Themen frei, darunter akademische und hochspezialisierte Titel. Das Pro-Abo umfasst auch erweiterte Funktionen wie Premium-Vorlesen und den Recherche-Assistenten.
Beide Abopläne sind mit monatlichen, halbjährlichen oder jährlichen Abrechnungszyklen verfügbar.
Wir sind ein Online-Lehrbuch-Abo, bei dem du für weniger als den Preis eines einzelnen Buches pro Monat Zugang zu einer ganzen Online-Bibliothek erhältst. Mit über 1 Million Büchern zu über 990 verschiedenen Themen haben wir bestimmt alles, was du brauchst! Erfahre mehr über unsere Mission
Achte auf das Symbol zum Vorlesen bei deinem nächsten Buch, um zu sehen, ob du es dir auch anhören kannst. Bei diesem Tool wird dir Text laut vorgelesen, wobei der Text beim Vorlesen auch grafisch hervorgehoben wird. Du kannst das Vorlesen jederzeit anhalten, beschleunigen und verlangsamen. Erfahre mehr über die Funktion „Vorlesen“
Ja! Du kannst die Perlego-App sowohl auf iOS- als auch auf Android-Geräten nutzen, damit du jederzeit und überall lesen kannst – sogar offline. Perfekt für den Weg zur Arbeit oder wenn du unterwegs bist. Bitte beachte, dass wir Geräte, auf denen die Betriebssysteme iOS 13 und Android 7 oder noch ältere Versionen ausgeführt werden, nicht unterstützen können. Mehr über die Verwendung der App erfahren
Ja, du hast Zugang zu Sensoren und Sensorschnittstellen von Felix Hüning im PDF- und/oder ePub-Format sowie zu anderen beliebten Büchern aus Technik & Maschinenbau & Elektrotechnik & Telekommunikation. Aus unserem Katalog stehen dir über 1 Million Bücher zur Verfügung.