¿Qué entendemos por robot? Primero, debemos comenzar por enfrentar la idea popular que un robot es un androide como los conocidos Terminator, C-3P0 o todos los que tengan alguna forma "humanoide". En esta publicación, Enrique Arnáez Braschi condensa temas sumamente abstractos, de manera sencilla, sobre la teoría de manipuladores robóticos. Específicamente, explica los temas enfocados en el modelamiento y control de movimiento de robots. Este libro resume, en una forma práctica, estudios, trabajos e investigaciones que el autor ha realizado desde hace más de catorce años para plasmar el enfoque práctico de la parte teórica del control moderno y de la robótica. La teoría de control moderno emplea, durante sus diferentes etapas para el diseño de los controladores, un amplio número de ciencias y herramientas como álgebra lineal, teoría de vectores y matrices, cálculo diferencial y programación, para esta última herramienta el autor emplea Matlab®.Este libro, conformado por 7 capítulos y aplicaciones den Matlab, será de suma utilidad para todo ingeniero que vaya analizar el comportamiento de un sistema controlado, o para controlarlo, y que deba investigar la teoría que sostiene la conducta del movimiento y modelamiento del robot.
eBook - ePub
Enfoque práctico de la teoría de robots
Con aplicaciones en Matlab
- 179 páginas
- Spanish
- ePUB (apto para móviles)
- Disponible en iOS y Android
eBook - ePub
Descripción del libro
Cuenta con la confianza de 375,005 estudiantes
Acceso a más de 1 millón de títulos por un precio mensual asequible.
Estudia de forma más eficiente usando nuestras herramientas de estudio.
Información
Año
2017ISBN del libro electrónico
9786123180256
Categoría
PedagogíaCategoría
Educación superiorCapítulo 1. Introducción a la teoría de robots
«Robot», es una palabra que como tal fue empleada por primera vez por el escritor checo Karel Ĉapek en su obra Opitek en 1917, la cual etimológicamente proviene de la palabra ‘robota’, que significa ‘servidumbre’, ‘esclavitud’ o ‘trabajo obligado’.
La robótica es una nueva disciplina que se encarga del estudio y del diseño de los robots y del movimiento de objetos en el espacio. Las causas que impulsan a la robótica están dadas por procesos industriales peligrosos como altas temperaturas o ambientes contaminados, por el alto costo de la fuerza de trabajo, y por la efectividad económica al optimizar la relación costo-beneficio.
Debemos comenzar por enfrentar algunas ideas populares. Primera: un robot no es un androide necesariamente, como los conocidos Terminator, C-3P0 o todos los que tienen dos brazos, dos piernas y forma ‘humanoide’ en general.
En ese contexto las siguientes preguntas son válidas: ¿Sería útil darle forma humana a un robot? ¿Por qué a una invención debemos asignarle nuestras limitaciones físicas?
Como postulado, asumiremos que, desde el punto de vista de la ingeniería, nunca le debemos dar las limitaciones humanas a los robots. Segunda: los robots se caracterizan por tener un órgano terminal con forma de mano, es decir, cuentan con por lo menos una garra, característica que los define como manipuladores. Y tercera: toda la teoría de manipuladores estudia la cinemática y la dinámica de robots estáticos, pero es fácilmente aplicable a robots móviles cuando estos son dotados de ruedas o de piernas y un sistema de navegación adecuado.
Entonces, las principales características que deben darse en un robot son:
1. Es un manipulador reprogramable multifuncional: ya que debe manipular o mover objetos, debe ser reprogramable para realizar diversos movimientos y debe ser multifuncional para ejecutar varias aplicaciones.
2. Ejecuta acciones en forma automática: está compuesto de una estructura mecánica y de un sistema de control programable.
Adicionalmente, la demanda de exploración ha llevado a desarrollar sistemas autónomos que trabaje con gran precisión como son los vehículos aéreos no tripulados, más conocidos como UAV, de sus iniciales anglosajonas Unmanned Aerial Vehicle, así como sus versiones terrestres, marinas y submarinas. Inclusive, invita a pensar en el desarrollo de armas inteligentes con comportamientos «de robots» como son los misiles de última generación. En este caso, los sistemas de puntería harían las veces de órganos terminales que buscan alcanzar el objetivo que es el blanco militar.
Con esta apreciación, y coincidente con el profesor Peter Corke, la definición de un robot debe darse a un sistema autónomo capaz de realizar diversas tareas y que cumpla un objetivo.
Los manipuladores de robóticos tienen complejas dinámicas no lineales que hacen muy pesado el diseño de sus controladores. Afortunadamente, la dinámica del robot está dentro de la clase de la dinámica de los sistemas de Lagrange, los cuales tienen propiedades físicas modelables y, por ende, es más aplicable su control.
Para abarcar los temas en los que se centra la robótica, debemos saber que estos son:
a. La arquitectura de los manipuladores.
b. La definición de las trayectorias.
c. La cinemática de los robots.
d. La dinámica de los robots.
No es rígido el orden de los temas tocados líneas arriba, pues por cada proyecto de diseño tendremos muchas limitaciones las cuales dirigirán el punto de inicio y su respectiva secuencia dentro de los temas en cuestión. Por ejemplo, si se otorga un trabajo específico y ya se cuenta con un manipulador, podríamos comenzar con la definición de trayectorias o con la cinemática. Sin embargo, si no contamos con el manipulador, podemos partir de la arquitectura que optimice el empleo del ambiente de trabajo.
Gráfico 1.1 Secuencia de operación de un robot
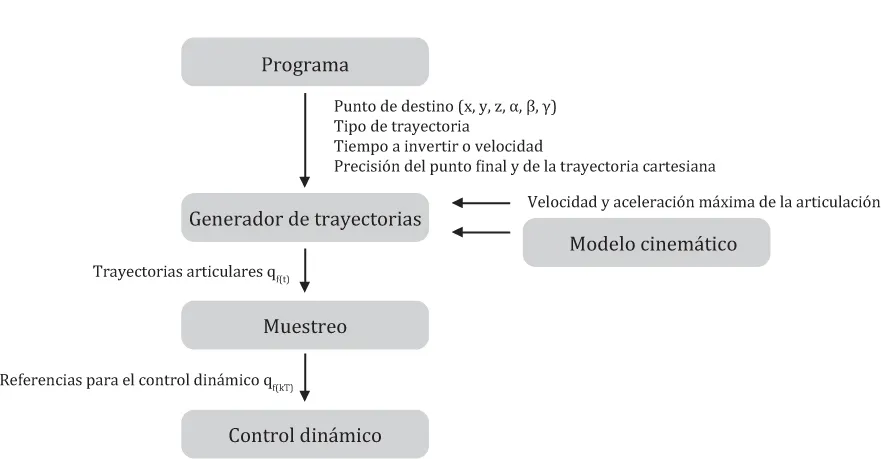
Una vez finalizado el diseño y considerando que la operación será la labor permanente del manipulador, describiremos la secuencia técnica de operación:
1. Se definen como entradas el punto de inicio y final del recorrido del manipulador.
2. Se generan las trayectorias de cada articulación para realizar este recorrido en el menor tiempo posible. Es decir, empleando las velocidades y aceleraciones máximas de diseño de los actuadores.
3. Se muestrea la posición y se determina el error que procurará eliminarse.
4. Se genera el torque que demandan los actuadores para eliminar el error de posición, empleando el modelo dinámico del manipulador.
5. Se vuelve a muestrear la posición y se actualiza el torque hasta eliminar el error.
Capítulo 2. Arquitectura del robot
El concepto de arquitectura de un robot se refiere primordialmente al software y hardware que definen el ámbito de control de una máquina de este tipo. Una tarjeta controladora que ejecuta algún software para operar motores y la comunicación con el hardware es lo que la define realmente.
Los sistemas robóticos son complejos y tienden a ser difíciles de desarrollar, esto es debido a la gran variedad de sensores que deben integrar, así como al hecho de delimitar su rango de acción; por ejemplo, el radio de giro de un brazo robot o la altura máxima a la que puede levantar algún objeto que esté manipulando.
La nueva tendencia para el desarrollo de arquitectura robótica se ha enfocado en lo que podemos nombrar sistemas reactivos o bien basados en el entorno. Es decir, los robots tendrán la capacidad de reaccionar sin necesidad de la intervención humana ante ciertas situaciones de eventual peligro para la máquina.
2.1 Algunas definiciones importantes
Gráfico 2.1 Manipulador genérico
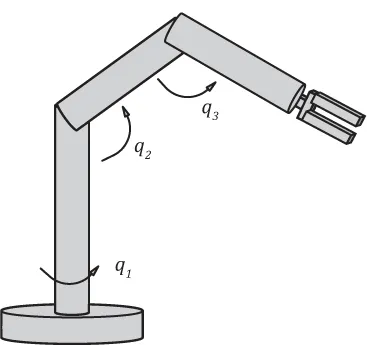
a. Grado de libertad: se le conoce con las siglas DOF del inglés Degree of Freedom, y se define como un movimiento elemental independiente del resto. Usualmente cada grado de libertad necesita de un actuador.
b. Eslabón o link: es la parte sólida, normalmente rígida que compone al robot. En la figura superior serían el brazo y el antebrazo.
c. Articulación: también conocida como joint o juntura, es la unión móvil entre los eslabones.
d. Mano o garra: es el actuador del manipulador capaz de sujetar un objeto.
2.2 Tipos de manipuladores por su movimiento
La geometría del robot manipulador tiene cinco clases básicas, las cuales van de la mano con los espacios de trabajo en los cuales se desenvuelven. Sus configuraciones se pueden apreciar en las siguientes figuras:
Gráfico 2.2 Tipos de arquitectura
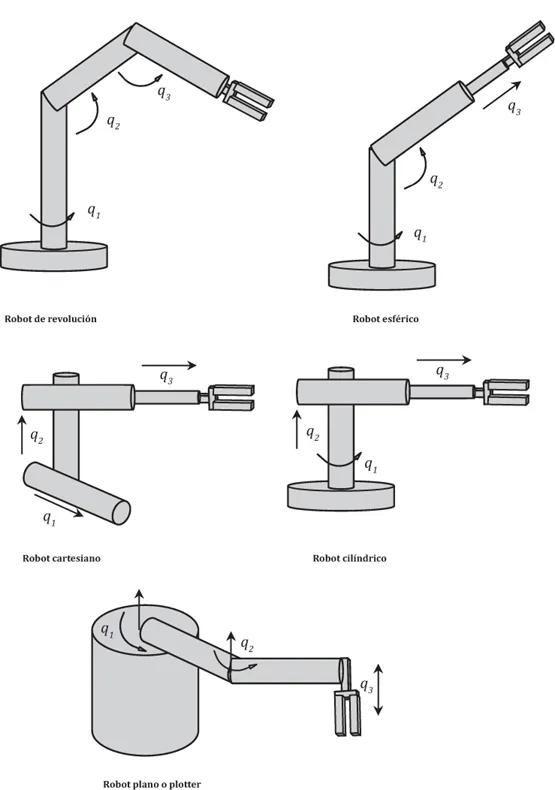
Tipo de robot | Ventajas | Desventajas |
Cartesiano Movimientos lineales sobre los ejes x, y y z. | Alta resolución y gran exactitud. Independencia de la carga de la gravedad. Movimiento articular sencillo. | Estructuralmente grande, usualmente con rieles o vías. Espacio de trabajo restringido. Ocupa gran espacio. |
Cilíndrico Movimientos lineales sobre los ejes x e y, y un movimiento angular alrededor del eje z. | No depende de la carga de la gravedad. Su mecánica es más sencilla que la del cartesiano. | Menor resolución y exactitud. Volumen de trabajo restringido. |
Es... |
Índice
- Hoja de créditos
- Dedication
- Contenido
- Prólogo
- Introducción
- Capítulo 1. Introducción a la teoría de robots
- Capítulo 2. Arquitectura del robot
- Capítulo 3. Planificación de trayectorias
- Capítulo 4. Cinemática de los robots
- Capítulo 5. Dinámica de los robots
- Capítulo 6. Controladores para manipuladores de robot
- Capítulo 7. Modelamiento y control de trayectorias completo en Matlab
- Apéndice. Introducción al Matlab
- Bibliografía
- Recientes publicaciones de Editorial UPC
Preguntas frecuentes
Sí, puedes cancelar tu suscripción en cualquier momento desde la pestaña Suscripción en los ajustes de tu cuenta en el sitio web de Perlego. La suscripción seguirá activa hasta que finalice el periodo de facturación actual. Descubre cómo cancelar tu suscripción
No, los libros no se pueden descargar como archivos externos, como los PDF, para usarlos fuera de Perlego. Sin embargo, puedes descargarlos en la aplicación de Perlego para leerlos sin conexión en el móvil o en una tableta. Descubre cómo descargar libros para leer sin conexión
Perlego ofrece dos planes: Essential y Complete
- El plan Essential es ideal para los estudiantes y los profesionales a los que les gusta explorar una amplia gama de temas. Accede a la biblioteca Essential, con más de 800 000 títulos de confianza y superventas sobre negocios, crecimiento personal y humanidades. Incluye un tiempo de lectura ilimitado y la voz estándar de «Lectura en voz alta».
- Complete: perfecto para los estudiantes avanzados y los investigadores que necesitan un acceso completo sin ningún tipo de restricciones. Accede a más de 1,4 millones de libros sobre cientos de temas, incluidos títulos académicos y especializados. El plan Complete también incluye funciones avanzadas como la lectura en voz alta prémium y el asistente de investigación.
Somos un servicio de suscripción de libros de texto en línea que te permite acceder a toda una biblioteca en línea por menos de lo que cuesta un libro al mes. Con más de un millón de libros sobre más de 990 categorías, ¡tenemos todo lo que necesitas! Descubre nuestra misión
Busca el símbolo de lectura en voz alta en tu próximo libro para ver si puedes escucharlo. La herramienta de lectura en voz alta lee el texto en voz alta por ti, resaltando el texto a medida que se lee. Puedes pausarla, acelerarla y ralentizarla. Obtén más información sobre la lectura en voz alta
¡Sí! Puedes usar la aplicación de Perlego en dispositivos iOS y Android para leer cuando y donde quieras, incluso sin conexión. Es ideal para cuando vas de un lado a otro o quieres acceder al contenido sobre la marcha.
Ten en cuenta que no será compatible con los dispositivos que se ejecuten en iOS 13 y Android 7 o en versiones anteriores. Obtén más información sobre cómo usar la aplicación
Ten en cuenta que no será compatible con los dispositivos que se ejecuten en iOS 13 y Android 7 o en versiones anteriores. Obtén más información sobre cómo usar la aplicación
Sí, puedes acceder a Enfoque práctico de la teoría de robots de Enrique Luis Arnáez Braschi en formato PDF o ePUB, así como a otros libros populares de Pedagogía y Educación superior. Tenemos más de un millón de libros disponibles en nuestro catálogo para que explores.