Fault tree analysis is an important technique in determining the safety and dependability of complex systems. Fault trees are used as a major tool in the study of system safety as well as in reliability and availability studies. The basic methods – construction, logical analysis, probability evaluation and influence study – are described in this book. The following extensions of fault trees, non-coherent fault trees, fault trees with delay and multi-performance fault trees, are also explained. Traditional algorithms for fault tree analysis are presented, as well as more recent algorithms based on binary decision diagrams (BDD).
1.1.1 Function of distribution and density of failure
We will study here the stochastic behaviour of single-component systems being subjected to failures (breakdowns) by observing them over a period of time. Let us simplify things by assuming that the system is put to work at the instant t = 0 for the first time and that it presents a single mode of failure.
The component, starting a lifetime period at the instant t = 0, is functioning for a certain period of time X1 (random) at the end of which it breaks down. It remains in this state for a period of time Y1 (random) during its replacement (or repair) and, at the end of this time, the component is again put to work and so on. In this case, the system is said to be repairable. In the contrary case, that is to say, when the component breaks down and continues to remain in this state, the system is said to be non-repairable.
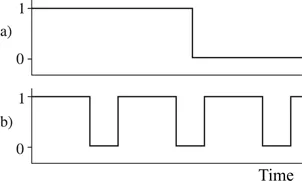
It is possible to present a graphic description of the behavior of the above- described system in different ways, the phase diagram being the most common.
Let X be a random variable (r.v.) representing the lifetime of the system with F, its cumulative distribution function (c.d.f.):
Figure 1.1Phase diagrams: (a) non-repairable system and (b) repairable system 1: state of good functioning 0: state of breakdown
If F is absolutely continuous, the random variable X has a probability density function (p.d.f.) f and can be written as:
Regarding the probability evaluation of fault trees, we always have to make the distinction between the occurrence or arrival of an event and its existence at the time t. Let us consider, for example, that the f.r. F of the duration of life of a component has an p.d.f. f. The assertion “the occurrence of the failure of the component at the time t” means that the failure took place within the time interval (t, t +
t], where Δt → 0; as a result, its probability is given by: f(t)
t + o(
t). On the other hand, the assertion “existence of the failure at the time t” means that the failure took place at the time x ≤ t and its probab...
Table of contents
Cover
Titlepage
Copyright
Introduction
Chapter 1: Single-Component Systems
Chapter 2: Multi-Component Systems
Chapter 3: Construction of Fault Trees
Chapter 4: Minimal Sets
Chapter 5: Probabilistic Assessment
Chapter 6: Influence Assessment
Chapter 7: Modules – Phases – Common Modes
Chapter 8: Extensions: Non-Coherent, Delay and Multistate Fault Trees
Chapter 9: Binary Decision Diagrams
Chapter 10: Stochastic Simulation of Fault Trees
Exercises
Appendices
Main Notations
Bibliography
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Fault Trees by Nikolaos Limnios in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Electrical Engineering & Telecommunications. We have over one million books available in our catalogue for you to explore.