![]()
1
Introduction
Autonomy is replacing the human operator in many applications. Examples involve military systems where there is some element of danger to the human operator, civilian systems when handling hazardous materials, as well as monotonous operations such as surveillance, reconnaissance and dull, dirty and dangerous missions, such as operations in chemical and biological environments (Blyenburgh 1999; NMAB and ASEB 2000) and in environmental monitoring (Roberts et al. 2008). The replacement of the human operator in such systems necessitates the development of autonomous systems techniques. Such autonomous systems operate in many environments, such as in the air, in and under water, in space or on the land.
In this book, unmanned aerial vehicles (UAVs) are studied, operating as a group. The large range of potential applications of UAVs in military and civilian sectors have generated a lot of academic as well as commercial research (OSD 2005; Wilson 2007). Inspired by examples in nature, such as flocks of birds, shoals of fish, swarms of bees, and colonies of ants, cooperative control (Rabbath et al. 2004; Uny Cao et al. 1997) has become one of the active research areas in autonomous systems. Employing a group of UAVs rather than a single UAV can result in cost-effective and fault-tolerant systems. Advances in avionics, navigation based on GPS (Global Positioning System), flight control techniques and low-cost electronics have further fuelled the use of UAVs in commercial and military applications. Future UAVs will be more autonomous than the remotely piloted reconnaissance platforms in use today.
One of the open issues in the development of autonomous systems is that of path planning. A path planning algorithm produces one or more safe flyable paths for the UAVs. The path has to be of a specified (usually minimal) length, and, as the UAV has limited range, the time spent surveying specific areas should be minimised. In addition, when surveying an area or a location, it is beneficial to be able to approach from specific directions in order to minimise obscuration as well as to aid identification. Hence the path length and direction will always be major factors in any path planning algorithm.
The UAVs should be capable of following any resulting path. This implies that the trajectory must comply with the speed and manoeuvre constraints of the UAVs. The path planning algorithms must also allow for the deployment of several UAVs in a coordinated manner, which will involve collision avoidance and simultaneous arrival at one or more locations. Finally, path planning algorithms are required to be coded in software that runs on a processor carried on-board the UAVs. Thus, they must be computationally efficient, take up a small amount of memory and operate in real time, enabling the UAV to re-plan its trajectory if needed, with no significant delay.
1.1 Path Planning Formulation
The primary aim of path planning is to provide structured mobility, that is, to facilitate moving or flying multiple UAVs from one location to another. There may be several locations to visit before reaching the final destination, and hence several consecutive paths may be required. Generally, there will be several predefined points of interest (POIs) on a known or partially known map/area. The UAV will have a specific attitude, which is combined with its location to give the UAV pose P(x, y, z, θ, ψ), where (x, y, z) is the UAV location or waypoint and (θ, ψ) are the horizontal and vertical angles, respectively. Consider a UAV moving from one pose, Ps, to another, Pf, where Ps and Pf are labelled the start and finish poses, respectively. Path planning involves producing one or more flight paths r(q) connecting Ps and Pf. Mathematically, this can be represented as
where r(q) is the resulting path, and q is defined as a path parameter. This parameter can be a length variable (0 ≤ q ≤ s) for a straight-line path or an angle variable (0 ≤ q ≤ θ) for a curved path. The choice of path variable depends on the path formulation.
Equation (1.1) is in a very simple form. For a single UAV flying from a location with start pose Ps(xs, ys, zs, θs, ψs) to a location with finish pose Pf(xf, yf, zf, θf, ψf), equation (1.1) can be written in the form
Extending equation (1.2) for N UAVs, where each pair of poses are connected by paths ri(q), gives
Equation (1.3) connects a pair of points by a path. This problem is well known as route planning in the fields of operations research, communications, computational geometry and graphics, where a route is generated between one or more nodes of a network. However, applying the route planning concept from these fields to flying vehicles becomes challenging. The route is usually defined by a set of waypoints joined by straight-line segments, which connect the start and finish waypoints, and hence may not be flyable because the UAV cannot turn instantaneously through each waypoint. For a flyable path, each segment must have a common tangent to produce a continuous path. Hence it is important to specify the orientations at each waypoint that each segment must match. This implies that some segments must be curved rather than straight in order that each end of the segment meets the common tangent condition. Also, some missions—such as target acquisition, search and track, and disaster area surveying—require the sensors to be pointed in specific directions for effective detection and identification.
1.2 Path Planning Constraints
Producing a path between the start and finish poses is straightforward in the absence of any constraints. In practice, there are various constraints involved in path planning, most being UAV-specific and the remainder arising from obstacles in the environment. Sometimes the violation of constraints, for example, communication failure, may lead to the complete loss of the UAV in extreme circumstances and to the loss of the UAV as a sensor platform in less extreme cases. Hence, safety of the UAVs is important throughout the mission. Other constraints such as the minimum turn radius will also dictate which paths are flyable and which are not.
Hence, the two most important constraints for path planning of a UAV are that the path must be flyable and safe. Flyable paths meet kinematic or motion constraints and dictate the manoeuvrability of the UAVs. The safety of the UAV is achieved by avoiding obstacles, either fixed or moving, that intersect the path. The obstacles may be UAVs, aircraft and buildings, which are common in airspace and in urban environments. Other constraints, such as maintaining communication range, as well as minimising time and/or path length, can be added into the system where necessary. We use the symbol
to represent the constraints. Hence the constrained path planning can be written in the form
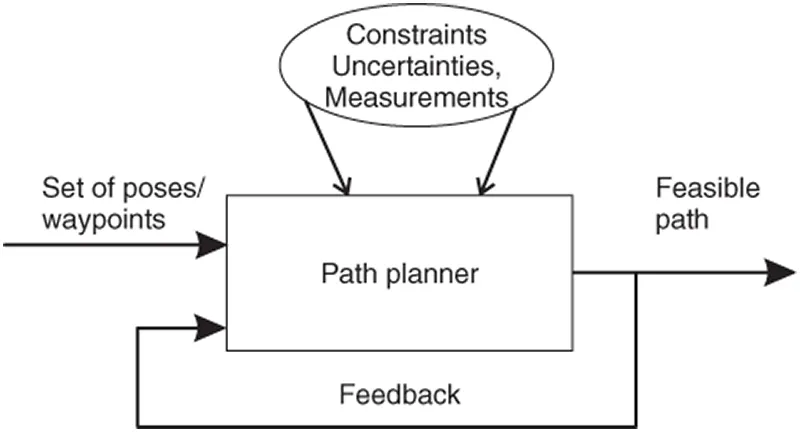
From equation (1.4), we can make an analogy that the path planner acts like a black box, which produces the flyable path from given inputs as shown in Figure 1.1. The inputs are the poses, with additional constraints, uncertainties and measurements. The feedback loop senses the measured states of the UAV and also feeds back the success in terms of meeting the constraints to the path planner.
1.2.1 Flyable Paths: Capturing Kinematics
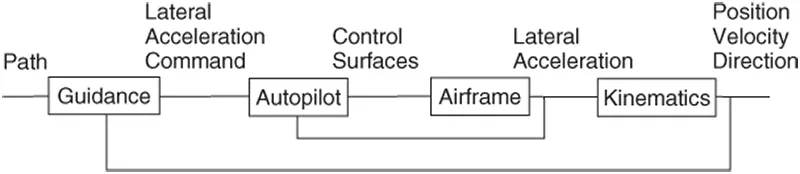
As the properties of the path influence the motion of the UAV and vice versa, it is important to understand the characteristics of the path. The UAV needs a path in order to move from one location to another. However, the path has to meet the dynamic constraints of the UAV. In order to understand the dynamic constraints of the UAV and hence the kinematic constraints of the path, consider the UAV as a control system. Two control loops are present in the UAV system, as shown in Figure 1.2. The inner loop is known as the autopilot and the outer loop is known as the guidance system. The guidance system provides lateral acceleration commands to keep the UAV following the path, whereas the autopilot controls the UAV elevator, ailerons and rudder to achieve the required lateral acceleration.
The UAV dynamics include the aerodynamics, which produces forces and torques on the airframe. From Newton's third law of motion, the forces and torques produce lateral, longitudinal and rotational accelerations. The accelerations are usually expressed in UAV body axes and these provide the link to the kinematics. The kinematics is produced by integrating the UAV lateral and rotational acceleration vectors to obtain the UAV velocity vector. The attitude angles and the current UAV position in the inertial frame give the UAV's translational and rotational velocity. For example, the two-dimensional (2D) path planner uses the kinematic model in equation (1.5). The kinematics and hence the current state of the UAV in 2D are thus
where v is the UAV velocity and θ is the horizontal heading angle.
Whether a given path is flyable or not is determined by the curvature of the path. The path planner has to produce a path r(q) that meets the dynamic turn rate constraint of the UAV, which is translated into the kinematic curvature constraint—in 3D, it is determined by both the curvature and torsion (Lipschutz 1969). By satisfying this constraint, the motion of the UAV stays within its maximum-curvature (acceleration) bounds. The curvature is proportional to the lateral acceleration. Thus the curvature at any point ...