The hard disk drive is one of the finest examples of the precision control of mechatronics, with tolerances less than one micrometer achieved while operating at high speed. Increasing demand for higher data density as well as disturbance-prone operating environments continue to test designers' mettle. Explore the challenges presented by modern hard disk drives and learn how to overcome them with Hard Disk Drive: Mechatronics and Control.
Beginning with an overview of hard disk drive history, components, operating principles, and industry trends, the authors thoroughly examine the design and manufacturing challenges. They start with the head positioning servomechanism followed by the design of the actuator servo controller, the critical aspects of spindle motor control, and finally, the servo track writer, a critical technology in hard disk drive manufacturing. By comparing various design approaches for both single- and dual-stage servomechanisms, the book shows the relative pros and cons of each approach. Numerous examples and figures clarify and illustrate the discussion.
Exploring practical issues such as models for plants, noise reduction, disturbances, and common problems with spindle motors, Hard Disk Drive: Mechatronics and Control avoids heavy theory in favor of providing hands-on insight into real issues facing designers every day.
The hard disk drive or HDD plays an important role in the modern era of digital technology. The HDD industry began its journey in 1956, and since then, it has traveled through a history of extra-ordinary achievements which is rivaled only by the semiconductor revolution. Storage capacity of the HDD has grown from mere 5 MB (Mega Bytes) in 1956 on fifty 24-inch disks to more than 100 GB (Giga Bytes) stored on one disk of
inch diameter. During this relatively short period, the HDD industry has fostered excellent innovations in various scientific and technological disciplines related to the design and manufacturing of HDD. Mechatronics and control played a vital role in this path of achieving rapid growth in the capacity of HDD and continuously decreasing cost.
The term Mechatronics, originated in Japan in late 1970s, describes a branch of engineering that is firmly established now. According to the Mechatronics Forum (UK), Mechatronics is the synergistic integration of mechanical engineering with electronics and control in the design and manufacturing of product process [138]. A mechatronic system is neither just a marriage of electrical and mechanical systems nor just a control system; it is a complete integration of all of them. Everyday we find systems and devices that involve mechatronics, e.g., a camera with auto-focus and auto-exposure, an automatic cash machine, a printer, a robot, and an automatic production line etc.
Many mechatronic systems demand for ultra-high precision in controlling the output of the system. The HDD is one such system where the tolerance limit for position error is only few nanometers. The HDD includes several subsystems some of which are mechatronic systems, and the integration of all these subsystems to realize a practical product is a challenging task. The mechatronic parts of HDD include the servomechanism that controls the position of the read-write heads of the HDD and the spindle motor system that spins the disks at precisely regulated speed. The challenging task of the HDD servo engineers can be visualized using the following analogy, which helps one to comprehend the difficulties faced in making an HDD and thus to appreciate the achievements of researchers and engineers from a variety of disciplines [81].
Imagine an airplane flying at 5M miles per hour but only
inch above the ground on a highway with 100,000 lanes where the width of each lane is only fraction of an inch. The challenge of the problem is further intensified by the fact that the airplane is expected to switch lanes frequently and then follow the new lane with the same precision. A scaled down version of this scenario is what one finds in the head positioning servomechanism of an HDD.
We live in an era of information technology where every aspect of our life is affected by some kind of information processing or information storage. Modern computing systems use different technologies to store information, either temporarily or permanently. These are semiconductor memories such as ROM (Read Only Memory), RAM (Random Access Memory) etc, magnetic storage such as hard disk, floppy disk, tape etc, and optical storage such as CD-ROM (Compact Disk - ROM), DVD (Digital Versatile Disk) etc. Important attributes of a storage device considered by users include cost, rate of data transfer, access time, and reliability. If low cost is the main consideration while selecting the storage device for a specific application then one must accept less desirable features such as slower response, lower transfer rate and poorer reliability.
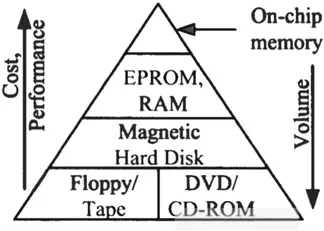
It is more efficient for the processor to access and store information in semiconductor RAM. The average access time (time taken by the process of recording or retrieval of data) is the shortest for this type of memory. However they are the most expensive, constitute the least of the storage volume associated with an information processing system, and form the highest level of the storage pyramid shown in Figure 1.1. The lowest level of this pyramid consists of removable storage devices such as magnetic tapes, zip-disks and floppy disks using magnetic recording, and CD-ROM, DVD etc employing optical recording technology. Removability is the main advantage offered by this class of storage devices. Magnetic tapes and floppy disks are cheap but very slow and, therefore, not suitable for on-line direct access of data or programs. Optical disks are widely used for applications like program distribution, library and archive, entertainment systems etc, but they are not suitable for on-line storage due to their slow performance and high cost per read/write element. This segment of storage market was dominated by magnetic tapes in the early days of computing, but the emergence of optical recording technology caused the tapes to be replaced gradually by more cost-effective CD-ROM, DVD etc.
Hard disk drives sit in the middle of the storage pyramid, between the semiconductor memories and removable drives, and occupy the non-removable on-line data storage niche. They provide direct access to large amounts of non-volatile storage (no power is required to preserve the data). Speed of data access in HDD is much higher than the removable, non-volatile storage, and its cost per gigabyte is only a fraction of that of non-volatile, direct access semiconductor memory such as “flash”. Hard disk drives are also known as Direct Access Storage Devices (DASD, pronounced as daz-dee).
Figure 1.1: Storage hierarchy pyramid in a computing system
In hard disk drives, a binary bit is stored in a tiny segment of the surface of a circular disk by magnetizing the medium coated on the surface with the help of an inductive head. In a majority of hard disk drives, the disk is spun at constant angular velocity by a spindle motor when the bits are written, and the head traces a circular path (Track) on the spinning disk. Saturated magnetization of the media is used and it is magnetized in one of the two possible polarizations. The transitions between two opposite polarizations in the magnetic medium can be sensed by a sensor held over the track of a spinning disk. The disks are spun at the same speed during both writing and reading. The read head and write head are fabricated on a single slider whose surface facing the disk is profiled such that an air bearing surface (ABS) is produced between the spinning disk and the slider. As a result, the slider is lifted and is not in contact with the disk. The separation between the slider and the spinning disk, known as the flying height, is maintained as constant as possible. Characteristics of the flying height depend on many factors such as profile of the slider surface, smoothness of the disk surface, rotating speed of the disk etc. Flying height has direct effect on the achievable areal density - a key parameter defining the storage capacity and is equal to the number of bits recorded in unit area of the disk surface. Demand for higher areal density has always been and still is the driving force behind the dramatic growth of the magnetic storage technology. Areal density in magnetic recording has grown by a factor of 5, 000, 000 over last four decades.
Some Commonly used Terminologies:
Data Track - Concentric circular (not perfectly) tracks on the disk where binary bits are stored sequentially.
Track Pitch - Distance between two adjacent tracks.
Track Density - Inverse of track pitch, i.e., the number of tracks in unit length of radius of the disk. It is usually defined in units of Tracks per Inch* (TPI).
Bit Density - Number of bits recorded per unit length of a track, defined in units of Bits per Inch (BPI).
Areal Density - Number of bits recorded per unit area of the disk surface. It is equivalent to the product of track density and bit density, and is defined in units of bits per square inch.
Access Time - This is the time required to retrieve a block of data from the disk and is equal to sum of seek time and average latency, both defined below.
Seek Time - Time taken by the head positioning servomechanism to move the read/write head from one track to another.
Single Track Seek Time - Seek Time for moving the head from one track to the adjacent track.
Average Seek Time - Exact Seek Time depends on the seek length, i.e., the difference between the initial track and destination track. Average Seek Time is an average of seek times for all possible seek lengths.
One-third Stroke Seek Time - Seek Time for moving head over a distance equal to one third of the maximum stroke.
Latency - The process of reading or writing can not be initiated immediately after positioning the head over the destination track as the exact location of the track may not be under the head at that moment. The read-write process must wait for some time before the desired sector of data is available. This waiting time is the latency, and it contributes to the access time.
Average Latency - Each data retrieval process has a different latency. Average latency is the time equal to half the time required for one revolution of the disk.
During the process of seek from one track to another, the error between the position of the head and the destination track gradually becomes smaller. However, it is practically impossible to bring the error to zero and maintain it there from that time onward. Even though the head positioning servomechanism tries to make the head follow the center of a track while reading or writing data, it is practically not possible to make the error zero. So the end of a seek process does not imply zero position error. In fact, the seek is assumed to come to an end if the position error remains less than some pre-specified limit for few consecutive samples. The limit is typically 15% of the track pitch before a reading operation is allowed, and 10% of track pitch for a seek prior to writing data. This is a major difference from the typical definition of settling time in control system step responses. In HDD servo mechanism, the error must be less than 10%(writing) or 15%(reading) of a single track irrespective of the number of tracks traversed by the seek operation. Let us consider a seek command asking for movement of the head from track N to track N + 100, which is equivalent to a step response with yref = 100. According to the definition of 5% settling time in linear control system, the settling time is equal to the time it takes to bring the position error within ±5 tracks. And it is equal to ±10 tracks for a seek command of 200 tracks. However, in HDD servomechanism, the limit of position error is 10% (writing) or 15% (reading) of one track for all seek lengths.
1.1 History of HDD Technology
The HDD industry has a relatively short but fascinating history. In four decades it evolved from a monstrosity with fifty 24-inch diameter disks storing only 5 MB of data to today’s drives storing close to 100 GB (100,000,000,000) of data on one surface of a disk in a
inch drive. This enormous growth was made possible by developments in diverse fields of knowledge including materials, tribology, mechanics, servo control, signal processing and electronics. Drives of first generation were significantly different from the drives we see now in aspects like size, capacity, and ...
Table of contents
Cover
Title Page
Copyright
Authors
Table of Contents
Preface
List of Acronyms
List of Figures
List of Tables
1 Introduction
2 Head Positioning Servomechanism
3 Design of Actuator Servo Controller
4 Spindle Motor Control
5 Servo Track Writer
Bibliography
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Hard Disk Drive by Abdullah Al Mamun,GuoXiao Guo,Chao Bi in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Mechanics. We have over one million books available in our catalogue for you to explore.