
- 108 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
A Learner’s Guide to Fuzzy Logic Systems, Second Edition
About this book
This book presents an introductory coverage of fuzzy logic, including basic principles from an interdisciplinary perspective. It includes concept of evolving a fuzzy set and fuzzy set operations, fuzzification rule base design and defuzzification and simple guidelines for fuzzy sets design and selected applications. Preliminary concepts of Neural Networks and Genetic Algorithm are added features with relevant examples and exercises. It is primarily intended for undergraduate and postgraduate students and researchers to facilitate education in the ever-increasing field of fuzzy logic as medium between human intelligence and machine.
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information
chapter 1
Unravelling Uncertainty Through Simple Examples
1.1 Introduction
This chapter is a sincere effort to explore different perceptions of the term “uncertainty”. The concept is explained so as to be understood by an engineering professional as well as a layperson. Simple examples are employed as a platform for explaining the term.
1.2 Examples
The Oxford Dictionary defines the meaning of the word uncertainty as “not knowing definitely”. Other descriptions include imprecision, inaccuracy, vagueness, inconsistency, ambiguity, unpredictability, etc. A layperson, however, is not worried about the exact meaning of uncertainty and the terms “uncertainty”, “ambiguity”, “vagueness”, etc. are largely used in everyday conversations rather than in the technical field. Such words and phrases are used interchangeably in different contexts without much thought. Before going into the significance of uncertainty, consider the following examples.
Example 1
Consider the issue of speed control of a separately excited direct current (dc) motor employing an armature voltage control, as shown in Figure 1.1(a). The objective is to achieve a desired motor speed under different load conditions. The variation in motor speed with different values of armature voltages against a load torque for a typical dc motor is plotted in Figure 1.1(b), neglecting the armature resistance variation and aging of the motor field.
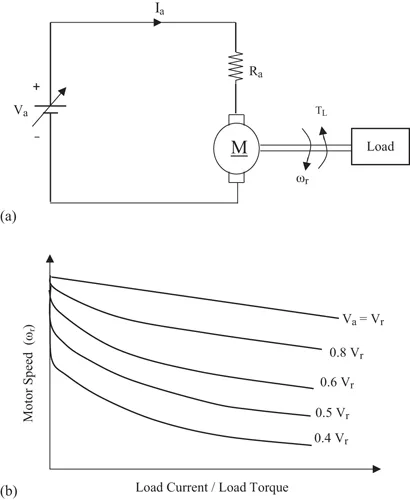
FIGURE 1.1 Direct current motor speed control: (a) circuit and (b) torque-speed characteristics.
Figure 1.1(b) shows that each speed-torque curve is almost a straight line with a negative slope and all such lines are parallel to each other. Here, Vr stands for rated armature voltage. This perfectly represents a linear system. For speed controller design, one needs to have a “model” of the dc motor, and in most cases, the model is a transfer function or a state-space representation. This model is time invariant and linear. The closed loop controller design can be realised using the linear control theory. The dynamic responses of the system at all operating points resemble each other. If the speed response is taken as the objective, then a good dynamic response is always achieved at all operating points of the motor.
Example 2
Consider the speed control of the same dc motor mentioned in Example 1; however, this time the motor armature is supplied from a silicon controlled rectifier (SCR) converter, as shown in Figure 1.2(a). Here, the armature voltage is controlled by varying the SCR firing angle, α. The variation in the motor speed against the load torque with several values of α is shown in Figure 1.2(b).
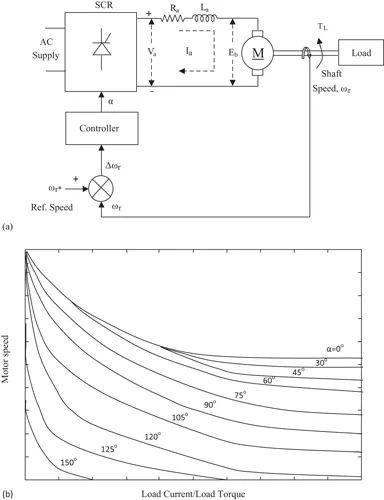
FIGURE 1.2 SCR converter–fed dc motor drive system: (a) schematic diagram and (b) torque-speed characteristics.
Clearly, unlike in the previous case, the characteristic curves are parallel only under rated torque conditions. Under light torque conditions, the curves are more steep and bent. This is attributed to discontinuous armature current under low torque conditions. Indeed, there are basically two modes of operation, namely, continuous and discontinuous modes with an SCR converter–fed drive. With continuous armature current, the drive system is described by two different sets of differential equations. Under the light load condition, the armature current is discontinuous and torque-speed curves have different slopes. If a feedback controller is designed for a typical operating point, it will produce a good/satisfactory response at that point; at all other points, the fixed gain controller performance need not be good/satisfactory. Rather, the response will differ largely with a change in the torque-speed curve.
Example 3
Consider the process of washing clothes. Evidently, the process does not have a model, but we follow three steps sequentially: soak, wash and rinse. The time period for each stage depends on how dirty the clothes are and the type of dirt on them. The quantity of washing powder required, too, depends on the aforementioned two factors. On many occasions, we repeat the three stages of washing until the clothes are clean.
Example 4
Consider the case of a final-year undergraduate student applying for admission to a suitable postgraduate (PG) programme in his/her native country or abroad. The objectives to be considered while looking for a programme are
- (a)Reputation of the institution,
- (b)Availability of financial assistance,
- (c)A master’s programme of his/her interest and
- (d)Employability of the programme.
To start the search, the student interacts with many seniors and faculty members of his/her current institute. The student explores online and communicates with potential professors abroad. At the end of the process, owing to sheer determination, the student secures admission. However, in most cases, it is uncertain whether all objectives are completely fulfilled. This is because, apart from the grades required for a postgraduate programme and entrance test scores, numerous factors such as the foreign policies of different countries, the availability of funds for financial assistance and the job market affect admission. Uncertainty also arises due to the multidimensional aspects of the objectives previously listed. Unlike the first two examples, no model exists for this case study. Most of the inputs are simple statements with no precision. Some of the statements could be partially true and a few others could be wrong. It depends on the ability/intelligence of the student to absorb the truth content and guide his/her search towards the best results.
In order to discuss the concept of uncertainty, let us initially define uncertainty as a measure of the guarantee of achieving a desired goal in a process. In the first two examples, our goal is to achieve a good dynamic response at all operating points. In the third example, the desired goal is to remove all dirt/stains from clothes. The goal in the fourth example is to gain admission to a reputed institute with financial assistance.
A closer observation of these four examples reveals that the first one represents a linear system. The dynamic responses of the motor speed at different operating points are identical, and no uncertainty is associated with them. In the second example, there are two/three state-space models in one complete cycle of operation leading to non-linearity. A fixed gain controller produces different transient responses at different operating points. One might think that “little uncertainty” is present in the dynamic responses under different load conditions. To make this aspect clearer, consider a motor drive that is used to move a passenger lift up and down. Let the full capacity of the lift be, say, eight passengers. With the set-up in Figure 1.1(a) in Example 1, irrespective of the number of passengers, a fixed gain controller produces a uniformly good dynamic response, i.e. the starting and stopping of the lift are always smooth and are independent of the number of people in the lift cabin. On the other hand, with an SCR converter–fed motor, a fixed gain controller always produces a good, satisfactory start-up/braking response in the case of four to eight passengers. However, oscillations or jerks are experienced during starting as well as braking of the lift cabin in the case of one to four passengers, as this is a light-load condition. Thus, in the second example, there is an uncertainty about the smooth functioning of the lift.
The third example has no defined model but has a practiced way of processing. Here, the objective is to make the clothes dirt free, and to achieve this goal, one needs to increase/decrease the number of stages of washing or repeat them a few times. However, there is no guarantee of the finishing time of the washing process or the level of cleanliness achieved. In other words, there is an increased level of uncertainty to achieve the goal of clean clothes. However, a clothes launderer faces very little uncertainty about the cleanliness of clothes since he has vast experience of washing different types of clothes with different varieties and amounts of dirt. When the experience of a clothes launderer is integrated with a commercially available washing machine, the machine becomes “automatic” and is more “successful” in reducing the uncertainty associated with washing clothes. An automatic washing machine is one of the best examples of a system making use of human experience.
The fourth example is more complex. Naturally, it has no model; further, the processing needs information from several individuals. Much of the information will be incomplete; some of it may be partially true or distorted. The student aspiring higher studies must judicially extract the essence of all the information and proceed. In this case, uncertainty is more compounded.
It is interesting to observe that most of us face challenges/tasks that are very similar to Example 4. The issues we face and ultimately sail through do not have any representation such as mathematical models or block diagrams. We receive inputs from our s...
Table of contents
- Cover
- Half-Title
- Title
- Copyright
- Dedication
- Contents
- List of Figures
- List of Tables
- Preface to Second Edition
- Author
- Chapter 1 ■ Unravelling Uncertainty Through Simple Examples
- Chapter 2 ■ Fuzzy Sets
- Chapter 3 ■ Fuzzy Reasoning
- Chapter 4 ■ Design Aspects of Fuzzy Systems and Fuzzy Logic Applications
- Bibliography
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access A Learner’s Guide to Fuzzy Logic Systems, Second Edition by K Sundareswaran in PDF and/or ePUB format, as well as other popular books in Mathematics & Mathematics General. We have over one million books available in our catalogue for you to explore.