![]()
1
Introduction to Network Robot Approach for Human–Robot Interaction
1.1 From Navigation and Manipulation to Human–Robot Introduction
There are two main streams in the early robotics. One is navigation and the other is manipulation. Navigation is the main function of an autonomous mobile robot. It observes the environment with cameras and laser scanners and builds the environmental model. With the acquired environmental model, it makes plans to move from the starting point to the destination. This is the navigation, and it was the main issue not only for robotics but also for artificial intelligence. On the other hand, manipulation is the main function of a robot arm. Many robot arms are working for assembling products in industries. They need to handle various objects in complicated environments. Although the space for the manipulation is limited, the structure of the robot arm is complex like a human. Therefore, manipulation required sophisticated planning algorithms.
The applications for navigation and manipulation were in industry. In other words, robotics was for industrial robots. And it completely changed the production lines. Recently, many robots are working instead of human workers. That is, we have solved main research issues for the industrial robots and developed the practical systems. Of course, we have not completely solved the research issues. It is quite important and necessary to deeply study the issue and improve the developed algorithms. However, on the other hand, robotics needs a new research issue.
That is “Interaction.” Industrial robotics developed key components for building more human-like robots, such as sensors and motors. From 1990 to 2000, Japanese companies developed various animal-like and human-like robots. Sony developed AIBO (Figure 1.1), which is a dog-like robot and QRIO (Figure 1.2), which is a small human-like robot. Mitsubishi Heavy Industries, LTD developed Wakamaru (Figure 1.3). Honda developed a child-like robot called ASIMO (Figure 1.4). Unfortunately, Sony and Mitsubishi Heavy Industries, LTD have stopped the projects but Honda is still continuing.
FIGURE 1.1
AIBO developed by Sony. (Source Sony Corporation.)
The purpose of these companies was to develop interactive robots with people. They have achieved a great success for the industrial robots. However, the development has been almost over, and they needed to develop new types of robots. Their focus was everyday life. They have tried to extend the application area of the robots from industrial environments to daily environments.
The most serious difference between industrial robots and robots works in the daily environments is “interaction.” In the daily environments, robots encounter with humans, and they have to interact with them before doing the task. Rather, the interaction will be the main task of the robots. These robots developed by the companies had various functions with the animal-like or human-like appearance to interact with people.
For navigation, the target robot was vehicle-type robot or mobile platform. For manipulation, the target robot was manipulator or arm robot. For interaction, the target robot is humanoid that has a human-like shape.
FIGURE 1.2
QRIO developed by Sony. (Source Sony Corporation.)
FIGURE 1.3
Wakamaru developed by Mitsubishi Heavy Industries, LTD.
FIGURE 1.4
ASIMO developed by Honda.
1.2 Interactive Robots
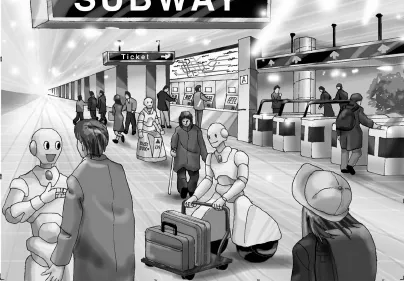
Figure 1.5 shows our future society with interactive robots. The robots developed by the companies will become part of the futuristic scene shown in Figure 1.5. The strongest reason is in the human innate ability to recognize humans and prefer human interaction. The human brain does not react emotionally to artificial objects, such as computers and mobile phones. However, it has many associations with the human face and can react positively to resemblances to the human likeness. Therefore, the most natural communications media for humans are humans. That is, humanoids and androids that have a very human-like appearance will be ideal media for humans. This is the reason why some companies have developed humanoid models, and why many people are interested in humanoids.
However, it is not so easy to realize the robot world shown in Figure 1.5. We have to solve the following three issues:
a. Sensor network for tracking robots and people
b. Development of humanoids that can work in the daily environment.
c. Development of functions for interactions with people.
The robot cannot completely observe an environment with onboard sensors. The robot can have cameras and laser scanners and observe the local environment around itself. However, it is quite difficult to monitor the whole environment in real time with the sensors. On the other hand, the human functions in a more sophisticated way to monitor the environment with the limited sensors. Humans can guess and infer the events that happen in the environment based on experience. Therefore, even if the sensors have limitations, humans can widely monitor the environment.
FIGURE 1.5
Interactive robots working in our future society.
The robot cannot take the same strategy as humans since it does not have the sophisticated method to infer events that happen in the wider environment with the onboard sensors. The current technology of artificial intelligence is not enough to simulate the human brain function.
The alternative way to monitor the wide environment is to use many sensors distributed in the environment. This is the idea of ubiquitous computing. We are already using various ubiquitous sensors in our current society. There are many surveillance cameras in banks, railway stations, and hospitals. Some of the cities are placing many cameras along streets for security purposes.
By extending this sensor network, we can develop more sophisticated sensor networks for monitoring both human and robot activities. Section 5 introduces the sensor network developed by us. It covers a wide area and stably monitors both humans and robots in real time.
The second issue is the development of humanoids. The most popular humanoid is ASIMO developed by Honda. The perfection level is very high, and it functions almost practical level. However, the biped mechanism is not perfectly safe. ASIMO cannot physically interact with young children. A more reliable and safe mechanism for moving is the mobile platform with two driving wheels used for Wakamaru.
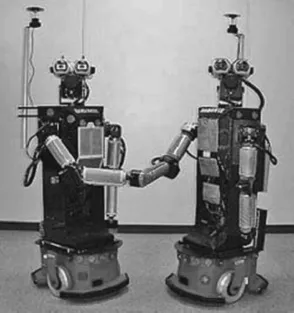
Wakamaru has been developed based on Robovie, an innovation from Intelligent Robotics and Communication Laboratories in Advanced Telecommunications Research Institute International (ATR). The design concept of Robovie was to have safe and stable hardware for interactive communication using gestures (Figure 1.6). It has two driving wheels and two arms and a head. Each arm has four degrees of freedom with minimum torque motors for gestures. Therefore, children can easily and physically stop the arm movements to avoid any dangerous situations.
FIGURE 1.6
Robovie developed by ATR.
In addition to the minimum mechanical hardware, Robovie has various sensors. It has two high-speed pan-tilt cameras on the head and an omnidirectional camera on the top of the pole attached in the back. The high-speed pan-title cameras are good for watching people standing in front of the robot, but they are not sufficient for observing the surrounding of the robot. For such a purpose, the omnidirectional camera works very well. Robovie is always monitoring its surroundings and quickly pays attention with the high-speed pan-title cameras when it finds something of significance.
Another important sensor is the tactile sensors that cover the whole body. Robovie also has several ultra-sonic sensors to monitor the surroundings. However, they are not enough. During interactions with people, they touch the body. In order to detect touching, we have developed tactile sensors by using conductive sheets.
The third issue is to develop functions for interacting with people. This is the most important issue for human–robot interaction. This book introduces many interactive behaviors implemented onto Robovie and the design policies.
1.3 Network Robots
The robots supported by the sensor networks are so-called network robots. The basic idea of the network robots is to enhance the robot abilities by integrating with ubiquitous network technology. The development of the network robots is supported by the Japanese government as a national project from 2004. The core members are ATR, NTT, Toshiba, Mitsubishi Heavy Industries, LTD, and Panasonic. The main purpose of the project is to extend the ability to recognize the real world and the ability to converse with a robot by connecting it with the sensor networks and other robots.
The most important progress of the project is the conversation ability of the robot. In addition to the laboratory experiments, we are performing various field tests of the developed robot in real environments. Through the field tests, we are verifying the conversation ability of the robots and finding new research issues.
This field tests are the most important methodology in the development of network robots. Without the field test, we cannot find real issues that we have to solve for realizing practical interactive robots. The fields for trials are elementary...