- 200 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Philosophical Applications Of Cognitive Science
About this book
One of the most fruitful interdisciplinary boundaries in contemporary scholarship is that between philosophy and cognitive science. Now that solid empirical results about the activities of the human mind are available, it is no longer necessary for philosophers to practice armchair psychology. In this short, accessible, and entertaining book, Alvin Goldman presents a masterly survey of recent work in cognitive science that has particular relevance to philosophy. Besides providing a valuable review of the most suggestive work in cognitive and social psychology, Goldman demonstrates conclusively that the best work in philosophy in a surprising number of different fields—including philosophy of science, epistemology, metaphysics, and ethics as well as philosophy of mind—must take into account empirical breakthroughs in psychology. One of those rare texts that will also be useful for professionals, Philosophical Applications of Cognitive Science is appropriate for students in a wide range of philosophy courses. It will also interest researchers and students in psychology who are intrigued by the wider theoretical implications of their work.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Topic
FilosofiaSubtopic
Epistemologia in filosofiaChapter One
Epistemology
The Questions of Epistemology
Epistemology addresses such questions as: (1) What is knowledge? (2) What is rationality? and (3) What are the sources and prospects for human knowledge and rationality? To answer question 3, we would have to inquire into the specific cognitive faculties, processes, or methods that are capable of conferring knowledge or rationality. Cognitive science is clearly relevant to such an inquiry. In asking about the “prospects” for knowledge and rationality, question 3 also hints that there may be limits or failings in people’s capacities to know or to be rational. Potential challenges and threats to knowledge and rationality have indeed been a focus of traditional epistemology. Here we shall address threats that stem from the potential inadequacy of some of our cognitive faculties and processes. Thus, whether we are addressing “sources” or “prospects,” cognitive science, as the science of our cognitive endowments, can make important contributions to epistemology.
Knowledge and the Sources of Knowledge
Let us start with knowledge, and let us first ask what knowledge consists in. Epistemologists generally agree that knowing, at a minimum, involves having true belief. You cannot know there is a snake under the table unless you believe that there is. Further, you cannot know there is a snake under the table unless it is true, i.e., unless a snake is really there. Epistemologists also agree that mere true belief is not sufficient for knowledge, at least in any strong or robust sense of the term. Suppose you have a phobia for snakes, and you are always imagining them in this or that part of your house. You haven’t looked under the table just now, nor has anybody said anything about a snake being there. But you are convinced that a snake is there. On this lone occasion you are right; someone has introduced a harmless garter snake for a practical joke. Is it correct to say that you know that a snake is under the table? Surely not. Thus, believing what is true is not enough to claim knowledge.
What must be added to true belief to qualify as knowledge? One popular answer, found in the reliability theory of knowledge, says that to be a case of knowing, a true belief must be formed by a cognitive process or method that is generally reliable, i.e., one that generally produces true beliefs. In the snake example this condition is not met. Your supposition that a snake is under the table does not stem from seeing it or from being told about it by someone who has seen it; it results from phobia-driven imagination. This way of forming beliefs is not at all reliable. Hence, although it coincidentally yields true belief on the specific occasion in question, it does not yield knowledge.
A detailed formulation of the reliability theory of knowledge requires many refinements (see Goldman 1979, 1986, 1992b). Let us suppose, however, that something along these general lines is correct. We can then return to the question posed earlier concerning the sources and prospects for human knowledge. Under the reliability theory this question becomes: Which mental faculties and procedures are capable of generating true or accurate beliefs, and which are liable to produce false or inaccurate beliefs?
In the seventeenth and eighteenth centuries, the rationalist and empiricist philosophers debated the question of which faculties were the most reliable for belief formation. The leading empiricists, John Locke, George Berkeley, and David Hume, placed primary emphasis on sense-based learning, whereas rationalists like René Descartes emphasized the superior capacity of reason to generate knowledge. Another central disagreement was over the influence of innate ideas or principles in knowledge acquisition. While the rationalists affirmed the existence of such innate factors, the empiricists denied them.
The debate between Descartes and Berkeley over the nature of depth perception will serve to illustrate this dispute. People regularly form beliefs about the relative distances of objects, but how can such judgments be accurate? What features of vision make such reliable judgment possible? As these early philosophers realized, images formed by light on the retina are essentially two-dimensional arrays. How can such two-dimensional images provide reliable cues to distance or depth?
Descartes (1637) argued that one way people ascertain the distance of objects is by means of the angles formed by straight lines running from the object seen to the eyes of the perceiver. Descartes compared this process to a blind man with a stick in each hand. When he brings the points of the sticks together at the object, he forms a mangle with one hand at each end of the base, and if he knows how far apart his hands are, and what angles the sticks make with his body, he can calculate, “by a kind of geometry innate in all men” (emphasis added), how far away the object is. The same geometry applies, Descartes argued, if the observer’s eyes are regarded as the ends of the base of a triangle, with the straight lines that extend from them converging at the object, as shown in Figure 1.1. Thus, perceivers can compute the distances of objects by a sort of “natural geometry," knowledge of which is given innately in humankind’s divinely endowed reason.
Berkeley, on the other hand, denied that geometric computations enter into the process: “I appeal to anyone’s experience whether upon sight of an object, he computes its distance by the bigness of the angle made by the meeting of the two optic axes? … In vain shall all the mathematicians in the world tell me that I perceive certain lines and angles … so long as I myself am conscious of no such thing" (1709, sec. 12, italics in original). Berkeley held that distance (or depth) is not immediately perceived by sight but is inferred from past associations between things seen and things touched. Once these past associations are established, the visual sensations are enough to suggest the “tangible" sensations the observer would have if he were near enough to touch the object. Thus, Berkeley’s empiricist account of depth perception posits learned associations rather than innate mathematical principles.
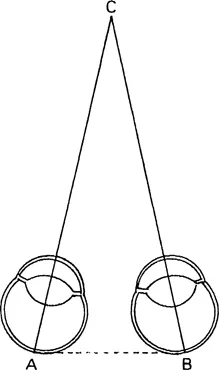
Figure 1.1 Schematic drawing (after Descartes) illustrating the distance information provided by convergence. Given the distance between the centers of the two retinas (AB) and the eyes’ angles of regard (Δ CAB and ΔCBA), the distance of object C can be computed. Source: E. Spelke, “Origins of Visual Knowledge,’’ in D. Osherson, S. Kosslyn, and J. Hollerbach, eds., Visual Cognition and Action (Cambridge, Mass.: MIT Press, 1990). Reprinted by permission.
This debate about depth perception continues today in contemporary cognitive science, although several new types of cues for depth perception have been proposed. Cognitive scientists also continue to debate the role of innate factors in perception. It is widely thought that perceptual systems have some innately specified “assumptions” about the world that enable them, for the most part, to form accurate representations. An example of such an “assumption” comes from studies of visual motion perception. Wallach and O’Connell (1953) bent pieces of wire into abstract three-dimensional shapes and mounted them in succession on a rotating turn table. They placed a light behind the rotating shape so that it cast a sharp ever-changing shadow on a screen, which was observed by the subject. The shadow was a two-dimensional image varying in time. All other information was removed from sight. Looking at the shadow, however, the subjects perceived the three-dimensional form of the wire shape with no trouble at all. In fact, the perception of three-dimensional form was so strong in this situation that it was impossible for the subjects to perceive the shadow as a rubbery two-dimensional figure. From this and other studies, it has been concluded that the visual system has a built-in “rigidity assumption": Whenever a set of changing two-dimensional elements can be interpreted as a moving rigid body, the visual system interprets it that way. That is, the visual system makes the two-dimensional array appear as a rigid, three-dimensional body. This response can produce illusions in the laboratory, as when flashing dots on a screen are seen as a smoothly moving rigid body. Presumably, however, the world is largely populated with rigid bodies of which one catches only partial glimpses. So this rigidity assumption produces accurate visual detection most of the time. The assumption is innate, and it is pretty reliable.
Visual Object-Recognition
Let us further explore the prospects for vision-based knowledge by considering the way the visual system classifies objects by reference to their shape. And let us ask not simply whether such classification can be reliable, but whether it can be reliable in suboptimal or degraded circumstances, e.g., when one has only a partial glimpse of the object. After all, in everyday life things are not always in full view, and we frequently have to identify them quickly without getting a better view. Under such conditions, can vision still enable us to identify objects correctly as chairs, giraffes, or mushrooms? If so, how does it do this? Classification must ultimately proceed from retinal stimulation. But no unique pattern of retinal stimulation can be associated with a single type of object, nor even a particular instance of the type, since differences in an object’s orientation can dramatically affect the retinal image. Furthermore, as just indicated, objects may be partially hidden or occluded behind other surfaces, as when viewed behind foliage. How and when can the visual system still achieve accurate object recognition?
A person stores in memory a large number of representations of various types or categories, such as chair; giraffe, mushroom, and so on. When perceiving an object, an observer compares its perceptual representation to the category representations, and when a “match” is found, the perceived object is judged to be an instance of that category. What needs to be explained is (1) how the categories are represented, (2) how the information from the retinal image is processed or transformed, and (3) how this processed information is compared to the stored representations so that the stimulus is assigned to the correct category.
One prominent theory, due to Irving Biederman (1987), begins with the hypothesis that each category of concrete objects is mentally represented as an arrangement of simple volumetric shapes, such as blocks, cylinders, spheres, and wedges. Each of these primitive shapes is called a geon (for geometrical ion). Geons can be combined by means of various relations, such as top-of, side-connected, larger-than, and so forth. Each category of objects is represented as a particular combination of related geons. For example, a cup can be represented as a cylindrical geon that is side-connected to a curved, handle-like geon, whereas a pail can be represented by the same two geons but with the handle-like geon on top of the cylindrical geon, as illustrated in Figure 1.2.
The geon theory postulates that when a viewer perceives an object, the visual system interprets the retinal stimulation in terms of geon components and their relations. If the viewer can identify only a few appropriately related geons, he may still be able to uniquely specify the stimulus if only one stored object type has that particular combination of geons. An elephant, for example, may be fully represented by nine component geons, but it may require as few as three geons in appropriate relations to be correctly identified. In other words, even a partial view of an elephant might suffice for accurate recognition if it enables the visual system to recover three geons in suitable relations.
When an object is partially occluded or its contours are somehow degraded, correct identification depends on whether the remaining contours enable the visual system to construct the right geons. Consider Figure 1.3. The left column shows five nondegraded stimulus objects. The middle column has versions of the same objects with some deleted contours. These deleted contours, however, can be reconstructed by the visual system by “filling in” smooth continuous lines. This enables the visual system to recover the relevant geons and identify the objects correctly despite the missing contours. The right column pictures versions of the same objects with different deleted segments. In these versions, the geons cannot be recovered by the visual system because the deletions omit telltale clues of the distinct geons. In the degraded cup, for example, one cannot tell that two geons are present (the bowl part and the handle). This makes identification difficult, if not impossible. Of course, one might
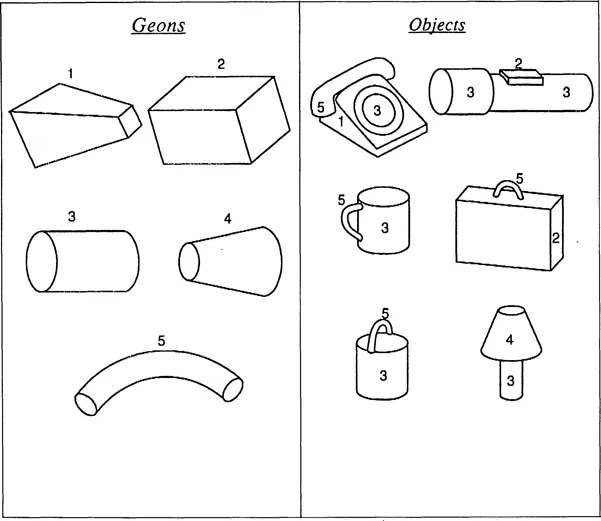
Figure 1.2 Geon components and their relations. (Left) A given view of an object can be represented as an arrangement of simple primitive volumes, or geons, of which five are shown here. (Right) Only two or three geons are required to uniquely specify an object. The relations among the geons matter, as illustrated with the pail and cup. Source: I. Biederman, “Higher-Level Vision,” in D. Osherson, S. Kosslyn, and J. Hollerbach, eds., Visual Cognition and Action (Cambridge, Mass.: MIT Press, 1990). Reprinted by permission.
guess rightly that the object is a cup, but such a guess could not yield knowledge. There is no reliable way of telling that the object is a cup. What Biederman’s theory of visual object-recognition reveals is the nature of the reliable process that does yield knowledge—a process involving detection of a sufficient number and combination of geons to secure a match to a unique object-model stored in memory. Because of this process, the visual system can get enough information to achieve knowledge even when objects are partially hidden or occluded.
The topic of perception is one to which we shall return in Chapter 2, when we discuss theory and observation in science. Right now, however, let us turn to the prospects for human rationality.
Rationality and Evidence
According to one popular principle of rationality, the total evidence principle, it is rational for a person S to believe a proposition p at time t only if p is well supported by the total evidence S possesses at t. The intuitive rationale for this requirement is straightforward enough. There are cases in which some of the evidence an agent possesses provides good support for a given propo...
Table of contents
- Cover
- Half Title
- Title
- Copyright
- Dedication
- Contents
- List of Tables and Figures
- Preface
- 1 EPISTEMOLOGY
- 2 PHILOSOPHY OF SCIENCE
- 3 PHILOSOPHY OF MIND
- 4 METAPHYSICS
- 5 ETHICS
- References
- About the Book and Author
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Philosophical Applications Of Cognitive Science by Alvin I. Goldman in PDF and/or ePUB format, as well as other popular books in Filosofia & Epistemologia in filosofia. We have over 1.5 million books available in our catalogue for you to explore.