- 688 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Kinematic Analysis and Synthesis of Mechanisms
About this book
This text/reference represents the first balanced treatment of graphical and analytical methods for kinematic analysis and synthesis of linkages (planar and spatial) and higher-pair mechanisms (cams and gears) in a single-volume format. A significant amount of excellent German literature in the field that previously was not available in English provides extra insight into the subject. Plenty of solved problems and exercise problems are included to sharpen your skills and demonstrate how theory is put into practice.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
INTRODUCTION
Devices have been used from time immemorial to augment human muscle power. Today we find devices in common use which supplement even human brain power and control systems. The most generalized name of all such devices is machine. Thus, a machine may include a wide range of devices starting from a simple lever or a chain-pulley to a complex robot or a computer. In this text, however, we shall consider only mechanical devices. Let us start our discussion with the definition of mechanisms and machines (a systematic study of mechanisms and machines is the objective of this text).
1.1 Mechanisms and Machines
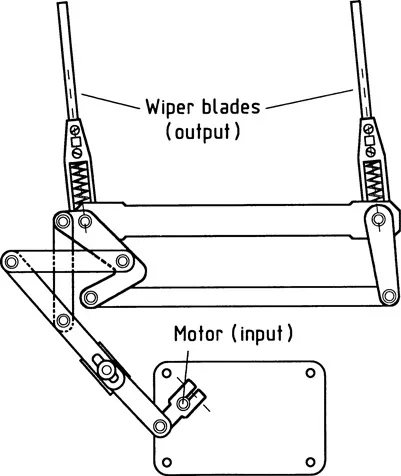
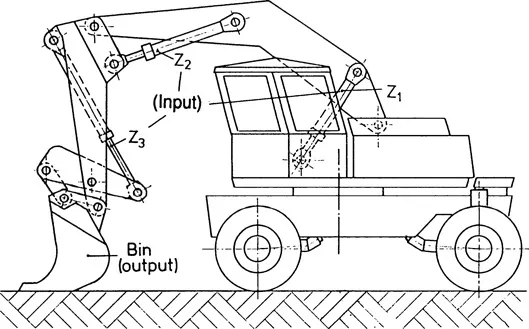
In engineering, mechanisms and machines are two very common and frequently used terms. However, it is not easy to accurately define these in a few words1. Broadly, they refer to devices which transfer mechanical motions and forces from a source to an output member. Such a definition, recommended by IFToMM (International Federation for the Theory of Machines and Mechanisms), thus does not distinguish a mechanism from a machine. On the other hand, several texts on the subject suggest that if the idea of transferring motion rather than force predominates, the device should be called a mechanism whereas, when substantial forces are also involved the device should be called a machine. For example, we can talk of a wiper mechanism for an automobile windshield (Fig. 1.1-1) and a hydraulically operated dumping machine (Fig. 1.1-2). In the former, the rotary motion of the motor (source) is converted to an oscillatory motion of the wiper-blades (output); the motor torque is transferred at the wiper to overcome the friction forces at the blade-screen interface. In the latter, the motions and forces available at the hydraulic cylinders, Z1, Z2 and Z3 (sources), are transferred to the bin (output). It may be appreciated that all parts comprising such a device must resist deformation and to a good approximation can be treated as rigid bodies (in most of the applications). At this stage, a mechanism (and a machine) can be defined as a combination of rigid bodies so shaped and connected that they move upon each other with definite relative motion for the purpose of transferring motions and forces from a source (input) to an output. As discussed below, the word mechanism or machine is used depending on the objective and scope of the study of these devices.
It is well recognized that the investigations of the motions of a rigid body (or interconnected rigid bodies) can be conveniently separated into two parts. The first one, dealing only with the geometric aspects, is called kinematics. In kinematics, no reference is made to the forces causing the motions. Given the motions of one (or more) member(s), those of the others in the device are investigated in order to satisfy the geometric constraints. In the second part, called kinetics, the motion characteristics are investigated with reference to the forces involved. The inertias of different moving parts obviously play an important role in kinetics.
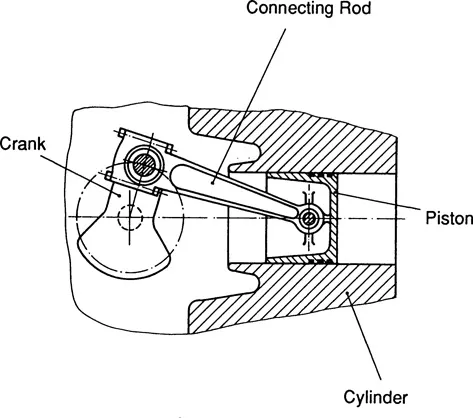
For the same system, the word mechanism is used if one is studying the kinematics, and the word machine is used while studying the kinetics. As an example, let us consider a commonly used device consisting of a crank, a connecting rod and a piston within a cylinder, shown in Fig. 1.1-3. Such a device is used for converting a rotary motion (of the crank) into a reciprocating motion (of the piston, as in an air compressor) or vice versa (as in an internal combustion engine). This device is called a slider (piston)-crank mechanism if we are studying the kinematics, e.g., the relationship between the linear velocity of the slider and the angular velocity of the crank, which is governed entirely by geometric dimensions. However, the same device may be referred to as a machine while studying its kinetics, e.g., the relationship between the driving moment at the crank and the forces acting on the piston.
It is worthwhile to note that the separation of kinematics and kinetics is possible only for a rigid body and a system of interconnected rigid bodies. For a high-precision, high-speed device, the approximation of its members by rigid bodies no longer remains valid. In a nonrigid member, forces cause deformations and change the geometry. Consequently the study of force and motion must take place simultaneously, which significantly increases the complexity of the problem. This book deals only with kinematics of interconnected rigid bodies.
It may be noted at this stage that, as recognized by Ampere′ in 1834, kinematics of interconnected rigid bodies forms a separate field of study vis-a-vis Newtonian dynamics. Since then, many specialized techniques, results and theorems have been derived towards a systematic study of kinematics of mechanisms. The study of kinematics not only forms the first step of designing a large number of mechanical devices, but very often this first step is also the most critical one if complex motion requirements are to be satisfied.
There are two aspects of the study of kinematics, namely analysis and synthesis. In kinematic analysis, the motion characteristics, such as displacement, velocity and acceleration, are investigated for given geometrical parameters. On the other hand, kinematic synthesis deals with the inverse problem, where the geometric parameters are to be determined so as to generate the desired motion characteristics. It is needless to say that both aspects are important to a designer, i.e., synthesis for coming up with a design and analysis for checking the performance of his design. A number of fundamental concepts in kinematics of rigid bodies are important for both analysis and synthesis. Before going into the details of the development and applications of these concepts, we will start with some basic definitions and nomenclature.
1.2 Kinematic Pairs
A mechanism is defined as a combination of rigid bodies connected so that each moves with respect to the other. A clue to the behaviour of the mechanism lies in the nature of the connections, called kinematic pairs, and in the type of relative motions they permit. If we consider the relative motion of two unconnected rigid bodies in a three-dimensional space, then six independent coordinates are required to describe this relative motion. In other words, this relative movement has six degrees-of-freedom, three of w...
Table of contents
- Cover
- Title Page
- Copyright Page
- Dedication
- Table of Contents
- 1 INTRODUCTION
- 2 PLANAR KINEMATICS OF RIGID BODIES
- 3 MOBILITY AND RANGE OF MOVEMENT
- 4 DISPLACEMENT ANALYSIS
- 5 VELOCITY AND ACCELERATION ANALYSIS
- 6 DIMENSIONAL SYNTHESIS
- 7 COUPLER CURVES
- 8 SPHERICAL AND SPATIAL LINKAGES
- 9 CAM MECHANISMS
- 10 GEARS
- BIBLIOGRAPHY
- INDEX
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Kinematic Analysis and Synthesis of Mechanisms by Asok Kumar Mallik in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Civil Engineering. We have over 1.5 million books available in our catalogue for you to explore.