
eBook - ePub
Urban Complexity and Planning
Theories and Computer Simulations
- 288 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
In recent years, there has been a new understanding of how cities evolve and function, which reflects the emergent paradigm of complexity. The crux of this view is that cities are created by differentiated actors involved in individual, small-scale projects interacting in a complex way in the urban development process. This 'bottom up' approach to urban modeling not only transforms our understanding of cities, but also improves our capabilities of harnessing the urban development process. For example, we used to think that plans control urban development in an aggregate, holistic way, but what actually happens is that plans only affect differentiated actors in seeking their goals through information. In other words, plans and regulations set restrictions or incentives of individual behaviour in the urban development process through imposing rights, information, and prices, and the analysis of the effects of plans and regulations must take into account the complex urban dynamics at a disaggregate level of the urban development process. Computer simulations provide a rigorous, promising analytic tool that serves as a supplement to the traditional, mathematical approach to depicting complex urban dynamics. Based on the emergent paradigm of complexity, the book provides an innovative set of arguments about how we can gain a better understanding of how cities emerge and function through computer simulations, and how plans affect the evolution of complex urban systems in a way distinct from what we used to think they should. Empirical case studies focus on the development of a compact urban hierarchy in Taiwan, China, and the USA, but derive more generalizable principles and relationships among cities, complexity, and planning.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
From Organized Anarchy to Controlled Structure: Effects of Planning on the Garbage-can Decision Processes1
1 Introduction
Planning occurs in an uncertain world in which events and outcomes arise in an unpredictable way. Planners realize this fact but sometimes believe unrealistically that they can control the processes as well as the outcomes. There is little backing for this overconfidence. Planning is thus carried out by planners overlooking or simplifying the complexity of relationships among intertwined events that are analytically inextricable. Recent approaches to planning methods attempt to cope with this complexity by drawing on methods of operations research to manage uncertainty rather than providing ultimate solutions to planning problems (Friend and Hickling, 1987). These approaches are claimed to be effective based not on some well-designed research methodology but on the users’ confidence or satisfaction in applying these approaches. The effectiveness of these approaches must be examined through careful research designs for dealing with ill-defined problems (Hopkins, 1984). Computer simulations provide a useful means for such explorations in that they can easily draw, from a particular population, large samples of data by manipulating experimental variables with a much lower cost than if real human subjects were used (e.g., Lee and Hopkins, 1995).
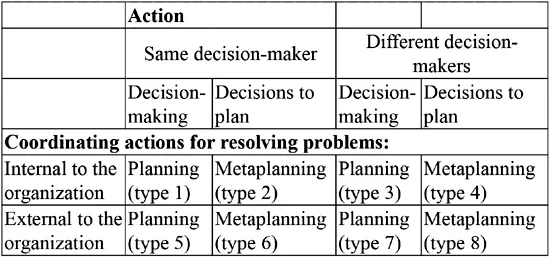
Most planning takes place in organizational contexts, such as corporations, firms, and governments. It is difficult to define planning in any exclusive way but we can at least identify that planning enhances decision-making by reducing uncertainty (Friend and Hickling, 1987; Hopkins, 1981). Organizations are artifacts designed for coordinating actions: that is, arranging sequences of actions to achieve certain goals. A plan is a set of related contingent decisions; therefore planning and organization are in part interchangeable (Lai and Hopkins, 1995). It is crucial, however, to distinguish between planning with respect to substantive decisions and planning with respect to planning activities (Hopkins, 1981). The first involves gathering information about related decisions made either by other decision-makers or by the same decision-maker with respect to various issues, whereas the latter concerns decisions to plan made either by other decision-makers or by the same decision-maker with respect to these issues. Though the study on planning with respect to decisions to plan or planning activities has not been well formulated, it could have implications on how planning activities should be organized and it thus worth pursuing (the exceptions include Sheshinsky and Intriligator, 1989). For convenience, I shall call the latter type of planning metaplanning. Table 1.1 shows planning and metaplanning as occurring in different organizational contexts. In reality, however, planning can progress through intertwined planning and metaplanning behaviors. A firm gathering information about another decision-maker’s decision to reduce uncertainty for improving decisions to maximize its profits is a manifestation of planning with respect to substantive decisions (type 3 planning), whereas a local government coordinating decisions to plan among its planning departments with respect to various issues to improve actions for resolving external problems imposed by the environment is an example of planning with respect to planning behavior (type 8 planning). In this chapter, the focus is on type 5 planning, namely, coordinating the actions or decisions of a single decision-maker or organizational entity to resolve problems external to the organization. This type of planning is most relevant to the assumptions of the standard theory of choice from which the garbage-can model of organizational choice was developed (Cohen et al., 1972).
I will present a partial computer simulation exploring the effects of planning on organizational decision processes based on the framework proposed by Lai and Hopkins (1995). In the framework, research design exploring planning effectiveness in spatial, temporal, and complex contexts was suggested based on three models: the garbage-can model (Cohen et al., 1972), the prisoner’s dilemma game (Nowak and May, 1993), and fractal space (Mandelbrot, 1983). In particular, planning behavior was introduced into the garbage-can model to compare its effects on the random decision-making sequences of the model. Therefore I will focus here on the garbage-can model by considering the effects of planning on the model under different planning investments. Planning investments are represented by the time periods in which related choices are compared and selected for enactment. To lend a concrete example to the simulation and show how this research can be related to land development, a survey was conducted on seven local land development firms to construct a prototypical organizational structure of the land development firm. Based on that structure, the effects of planning on the decision processes of that firm and on the generic organization were compared. A pilot study extending such simulation to incorporate important decision factors into the model was conducted and will be discussed in Section 6. I will first introduce the garbage-can model and consider how planning can be introduced in it. The simulation designs and results based on the designs are then depicted.
Table 1.1 A typology of planning contexts
2 The Garbage-can Model
Departing from the standard theory of organizational choice of a closed rational cycle connecting individual actions to environmental changes through organizational decisions, Cohen et al. (1972) proposed a behavioral theory of organized anarchy drawing on observations they made about how organizations, in particular public, educational, and illegitimate ones, make their decisions. The behavioral theory, or garbage-can model, they developed takes into account three general properties of such organizations. The first property is problematic preferences, meaning that the organizational actions are taken through ambiguous preferences. The second is unclear technology, indicating that the organizational decision processes are usually not understood by its members. The third is fluid participation, where the participants’ attention to the decision processes varies. Instead of providing a normative theory of decision-making for such an organization, Cohen et al. invented the garbage-can model of simulation to investigate how organizations make decisions under such ambiguous circumstances characterized by the three general properties.
In brief, the garbage-can model views the decision-making process of a decentralized organization, or organized anarchy, as random combinations of four elements: decision-makers, solutions, problems, and choice opportunities or garbage cans (Cohen et al., 1972). Each combination of four elements provides a decision context to produce outcomes. Problems and choice opportunities (garbage cans or choices) arise randomly with the other two elements thrown into these garbage cans in given organizational structures and something happens.
According to Lai and Hopkins’s definitions (1995), choices are situations in which decisions can be made, that is, commitments to actions to be taken. In organizations, votes to spend money or signatures on forms to hire or fire persons are examples of choices. Solutions are alternative actions that might be taken, such as persons who might be hired, tax schedules that might be lived, or land developments that might be approved. Solutions are things that choices can commit to enact, things we have the capacity to do directly. Problems are issues that are likely to persist and that decision-makers are concerned to resolve, such as homelessness, unfair housing practices, congested highway, or flooding. Note that choices enact solutions through decisions; they do not solve problems. We cannot merely choose not to have homelessness. We cannot “decide a problem.” We can choose to spend money on shelters or to hire social workers, which may or may not affect the persistence of homelessness as a problem. Decision-makers are units of capacity to take action in choice situations.
A garbage can is a choice opportunity where the elements meet in a partially unpredictable way. Solutions, problems, and decision-makers are thrown into a garbage can, resulting in complex outcomes. There is, however, no simple mapping of decision-makers to problems or of solutions to problems. Further, an organization has many interacting garbage cans, many interacting choice opportunities. The original model was used to investigate universities as an example of “organized anarchy.” Structure can be increased from this starting point, however, which enables the investigation of a wide range of types and degrees of organizational structure (e.g., Padgett, 1980). Planning and organizational design are at least partially substitutable strategies for affecting organizational decision-making. They are both means for “coordinating” related decisions.
The major assumption in the models is that streams of the four elements are independent of each other. Solutions may thus occur before the problems these solutions might resolve are organized. Choice opportunities may occur because regular meetings yield decision-maker status, independent of whether solutions are available.
With this general conceptual formulation, Cohen et al. (1972) ran a simulation addressing four variables: net energy load, access structure, decision structure, and energy distribution. Net energy load is the difference between the total energy required for a problem to be resolved and that available from decision-makers. Different net energy loads, roughly analogous to organizational capacity in the form of decision-makers relative to organizational demand, should yield differences in organizational behavior and outcomes. Access structure is the relationship between problems and choices. A zero-one matrix defines which problems can be resolved by which choices. Different access structures vary in the number of choices that can resolve particular problems. Decision structure defines which decision-makers can address which choices and thus how the total energy capacity of the organization can be brought to bear in resolving choices. For example, there were three types of access structures, unsegmented, hierarchical, and specialized, as shown in matrices A0, A1, and A2, and, respectively:
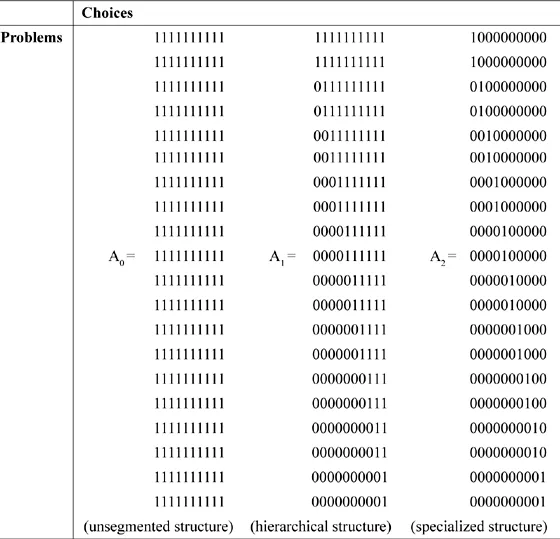
In the unsegmented structure, any active problem had access to any active choice; in the hierarchical structure, important problems (upper part of the matrix) had access to many choices; in the specialized structure, each problem had access to only one choice. The decision structures were classified in the same way except that there were only ten decision-makers. As to energy distribution, the model also assumed three types: important people-less energy, equal energy, and important people-more energy, with the total amount of energy loads: light (1.1 required per problem); moderate (2.2 required per problem); and heavy (3.3 required per problem). Solutions were represented through flows of solution coefficients serving as discount rates of effective energy. There were totally 34 (81) types of organizational situations obtained by taking all possible combinations of the values of the four variables.
In the simulation, there were in all 20 problems, ten choices, and 20 time steps. At each of the of the first ten time steps, two problems and one choice “arrived” according to respective random sequences. Decision-makers and problems were associated with each choice and the energy required to resolve the problems and that available from decision-makers were compared to determine if a decision could be made at each choice. If the amount of energy available was greater than that required for resolving the problems, the decision was made for that choice; otherwise the choice and the associated problems persisted in time, looking for appropriate decision-makers in future time steps to resolve these persisting problems.
Cohen et al. (1972) reported their results by focusing on four statistics: decision style, problem activity, problem latency, and decision difficulty. The three decision styles were resolution, oversight, and flight. Resolution meant that a choice taken resolved all or part of the problems that were thrown into the garbage can of that choice opportunity. If a decision was taken for a choice to which no problems were attached, it was classified as oversight. All other situations constituted flight. Cohen et al. were able to demonstrate the sensitivity of organizational behavior to various access structures and decision structures. For example, the decision process was quite sensitive to net energy load and to combinations of access and decision structures.
Extensions of the garbage-can model have been made by incorporating hierarchical structures of organization (Padgett, 1980); by exploring the behavioral merit of the model among publishers (Levitt and Nass, 1989); and by constructing computer simulations based on artificial intelligence (Masuch and LaPotin, 1989). Despite these later developments, the model seems to suffer from lacking external validity because there is no evidence yet showing that the garbage-can model is “the” behavioral theory of organizational choice. Even Cohen et al. (1972) admitted that the model did not describe all activities of any organization. Given its persuasive internal validity and the reasons depicted earlier, the garbage-can model simulates a microcosm in which uncertainty and ambiguity pervade, reminiscent of the uncertain world in which urban planning occurs. Thus it provides a useful starting point for the investigation of planning in organizations, and possible extensions could be made into modeling planning behavior in wider contexts, such as cities.
3 Planning in the Garbage-can Model
The original garbage-can model implied that the organization did not have control over the occurrence of problems and choices. Decisions incurred no cost and were not made mainly to resolve problems. In particular, the organization was not capable of generating choice opportunities to deal with problems that had arisen in a given time step. The arrival of choice opportunities and the arrival of problems were each random. One way of introducing a type of planning to the model is to allow the organization purposefully to create choice opportunities for resolving problems. This choice-problem dependence is a matter of degree with one extreme being the original garbage can and the other extreme a complete mapping of arriving problems to crated choice opportunities. This dependence can be represented by assigning weights to disutilities incurred by problems in the decision rule, as will be depicted in Section 6. This is equivalent to being able to compare garbage cans and choose one to act in at each time peri...
Table of contents
- Cover Page
- Title Page
- Copyright Page
- Contents
- List of Figures
- List of Tables
- Foreword by Michael Batty
- Foreword by Lewis D. Hopkins
- Preface
- 1 From Organized Anarchy to Controlled Structure: Effects of Planning on the Garbage-can Decision Processes
- 2 Effects of Planning on the Garbage-can Decision Processes: A Reformulation and Extension
- 3 A Spatial Garbage-can Model
- 4 An Agent-based Approach to Comparing Institutional and Spatial Changes in the Self-organizing City
- 5 On Traction Rules of Complex Structures in One-dimensional Cellular Automata: Some Implications for Urban Change
- 6 Applying Cellular Automata to Simulate Spatial Game Interactions to Investigate Effects of Planning
- 7 Planning for City Safety and Creativity: Two Metaphors
- 8 Emergent Macro-structures of Path-dependent Location Adoptions Processes of Firms
- 9 The Formation of Urban Settlement Systems: Computer Experiments and Mathematical Proofs of the Increasing-returns Approach to Power Law
- 10 Power Law Distribution of Human Settlements: An Explanation Based on Increasing Returns
- 11 A Preliminary Exploration on Self-organized Criticality of Urban Complex Spatial Systems
- 12 Planning in Complex Spatial and Temporal Systems: A Simulation Framework
- 13 Decision Network: A Planning Tool for Making Multiple, Linked Decisions
- 14 Effectiveness of Plans in the Face of Complexity
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Urban Complexity and Planning by Shih-Kung Lai,Haoying Han in PDF and/or ePUB format, as well as other popular books in Politics & International Relations & Urban Planning & Landscaping. We have over one million books available in our catalogue for you to explore.