eBook - ePub
The Future of Intelligent Transport Systems
- 272 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
The Future of Intelligent Transport Systems
About this book
The Future of Intelligent Transport Systems considers ITS from three perspectives: users, business models and regulation/policy. Topics cover in-vehicle applications, such as autonomous driving, vehicle-to-vehicle/vehicle-to-infrastructure communication, and related applications, such as personalized mobility. The book also examines ITS technology enablers, such as sensing technologies, wireless communication, computational technology, user behavior as part of the transportation chain, financial models that influence ITS, regulations, policies and standards affecting ITS, and the future of ITS applications. Users will find a holistic approach to the most recent technological advances and the future spectrum of mobility.
- Systematically presents the whole spectrum of next generation Intelligent Transport Systems (ITS) technologies
- Integrates coverage of personalized mobility and digital assistants, big data analytics and autonomous driving
- Includes end-of-chapter, open-ended questions that trigger thinking on the technological, managerial and regulatory aspects of ITS
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Subtopic
Transporte y navegaciónPart I
ITS technology enablers
- Chapter 1: Sensing and perception systems for ITS
- Chapter 2: Communication advances
- Chapter 3: Computing technologies: platforms, processors, and controllers
Chapter 1
Sensing and perception systems for ITS
Abstract
The goal of this chapter is to present both vehicle- and infrastructure-based sensing systems that can be employed for the development of ITS. Recent advances in sensor technologies such as high-speed and low-cost electronic circuits, novel signal processing methods, and advanced manufacturing technologies provide promising technical solutions with increased quality, reliability, and economic efficiency that may lead to more efficient ITS.
Keywords
V2V
V2I
CCAM
RADAR
highly automated vehicles
autonomous vehicles
1.1. Introduction: highly automated vehicles and the importance of perception
The ever-increasing utilization of vehicles along with the ongoing immense research in novel vehicular concepts has brought about the concept of highly automated and autonomous vehicles. The automation of vehicles—ultimately aiming at fully autonomous driving—has been identified as one major enabler to master the Grand Societal Challenges “Individual Mobility” and “Energy Efficiency”. Highly automated driving functions (ADF) are one major step to be taken. One of the major challenges to successfully realizing highly automated driving is the step from SAE Level 2 (partial automation) to SAE Levels 3 (conditional automation), and above. At Level 3, the driver remains available as a fallback option in the event of a failure in the automation chain, or if the ADF reaches its operational boundaries. At higher levels (4 and 5), the driver cannot be relied upon to intervene in a timely and appropriate manner, and consequently, the automation must be capable of handling safety-critical situations on its own. This is shown in Table 1.1.
Table 1.1
| SAE level | Name | Steering and acceleration | Perception | Fallback | System capabilities |
|---|---|---|---|---|---|
| Human in charge of perception | |||||
| 0 | No automation | Driver | Driver | Driver | None |
| 1 | Driver assistance | Driver + System | Driver | Driver | Some driving modes |
| 2 | Partial automation | System | Driver | Driver | Some driving modes |
| System full in charge of perception | |||||
| 3 | Conditional Automation | System | System | Driver | Some driving modes |
| 4 | High Automation | System | System | System | Some driving modes |
| 5 | Full Automation | System | System | System | All driving modes |
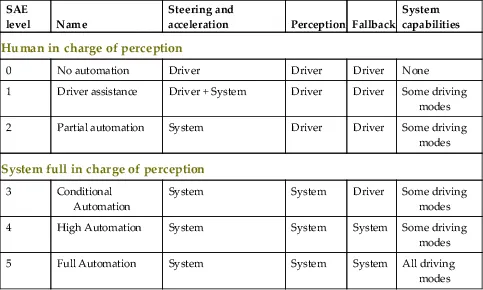
Source: ERTRAC, 2015.
The automation of vehicles is strongly linked to their interconnection (V2V communications), as well as to their connection to the transportation (and also telecommunication) infrastructure (V2I), as those kinds of communications can pave the way for the design and delivery of innovative services and applications supporting the driver and the passengers (cooperative, connected automated mobility—CCAM). Despite the numerous advances in several initiatives related to CCAM, there are still plenty of limitations to be overcome, especially in the following areas:
- 1. Deployment cost reduction: At this time, CCAM solutions are associated with high costs that are associated with the distribution of the necessary infrastructure for their deployment.
- 2. Communication availability improvement for CCAM: Availability of state-of-the-art communication infrastructure/technologies nation-wide.
- 3. Vehicle cooperation improvement: In-vehicle intelligence, connectivity, and coordination among heterogeneous technologies.
- 4. Driving safety improvement: CCAM solutions that will assist the driver in effectively handling sudden or unforeseen situations, especially for SAE Levels 3 and beyond.
- 5. Business models: Solutions that will envisage new revenue generators for all involved stakeholders, that is, vehicle-to-business communications.
- 6. Traveler’s information enhancement: Real-time, accurate, and tailored information provision to the driver, especially when information originates from multiple sources and is associated with large amounts of data.
Last, while many prototypes exist, which demonstrate CCAM technologies, they are confined to special applications and somehow limited to simple scenarios. Past and on-going projects on CCAM focus on vehicle platooning, where vehicles operate in a well-defined and structured environment (highway scenarios).
In such a context, the vehicle needs to efficiently (in a fail-operational manner) perceive its environment, that is acquire contextual information, so as to be fully aware of its surroundings and be able to take optimal decisions regarding its velocity, direction, and overall behavior on the road.
Any mobile robot must be able to localize itself, perceive its environment, make decisions in response to those perceptions, and control actuators to move about (Burgard et al., 1999). In many ways, autonomous cars are no different. Thus many ideas from mobile robotics generally are directly applicable to highly automated (also autonomous) driving. Examples include GPS/IMU fusion with Kalman filters (Thrun, Burgard, & Fox, 2005), map-based localization (Dellaert et al., 1999), and path planning based on trajectory scoring (Kelly & Stentz, 1998). Actuator control for high-speed driving is different than for typical mobile robots and is very challenging. However, excellent solutions exist (Talvala, Kritayakirana, & Gerdes, 2011).
However, the general perception is unsolved for mobile robots and is the focus of major efforts within the research community. Perception is much more tractable within the context of autonomous driving. This is due to a number of factors. For example, the number of object classes is smaller, the classes are more distinct, rules offer a strong prior on what objects may be where at any point in time, and expensive, high-quality laser sensing is appropriate. Nevertheless, perception is still very challenging due to the extremely low acceptable error rate.
1.2. Driver’s sensor configurations and sensor fusion
Driven by the demand for fewer accidents and increased road safety, the automotive industry has started with the implementation of driving assistance systems into vehicles several years ago. These assistance systems include adaptive cruise control, blind-spot detection, forward collision warning, and automatic emergency braking, among others. As main sensors for monitoring of the vehicle environment 2D cameras were used, in recent times also RADAR sensors have been increasingly employed for increased reliability. During the last years, it became more and more evid...
Table of contents
- Cover
- Title page
- Contents
- Copyright
- Introduction
- Part I: ITS technology enablers
- Part II: ITS users
- Part III: ITS business models
- Part IV: ITS regulations, policies and standards
- Part V: The future of ITS applications
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access The Future of Intelligent Transport Systems by George J. Dimitrakopoulos,Lorna Uden,Iraklis Varlamis in PDF and/or ePUB format, as well as other popular books in Tecnología e ingeniería & Transporte y navegación. We have over 1.5 million books available in our catalogue for you to explore.