
- 394 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
Sensors for Mechatronics
About this book
Sensors for Mechatronics, Second Edition, offers an overview of the sensors and sensor systems required and applied in mechatronics. Emphasis lies on the physical background of the operating principles that is illustrated with examples of commercially available sensors and recent developments. Chapters discuss the general aspects of sensors, with a special section on quantities, notations and relations. In addition, the book includes a section devoted to sensor errors and error minimization that apply to most of the sensors discussed. Each subsequent chapter deals with one class of sensors, pursuing a classification according to physical principles rather than measurands.Categories discussed include resistive, capacitive, inductive and magnetic, optical, piezoelectric and acoustic sensors. For each category of sensors, a number of applications is given. Where appropriate, a section is added on the interfacing of the sensor.- Presents a fully revised, updated edition that focuses on industrial applications- Provides comprehensive coverage of a wide variety of sensor concepts and basic measurement configurations- Written by a recognized expert in the field with extensive experience in industry and teaching- Suitable for practicing engineers and those wanting to learn more about sensors in mechatronics
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information
Introduction
Abstract
Keywords
1.1 Sensors in mechatronics
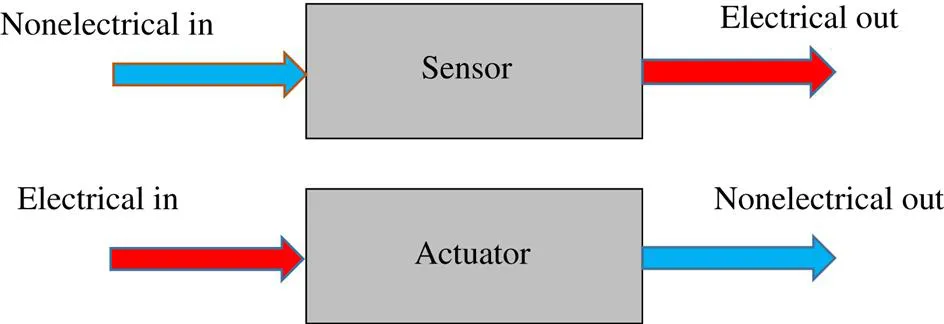
1.1.1 Definitions
- • to protect the sensor from being loaded or to reduce loading errors;
- • to match the sensor output range to the input range of the analog to digital converter (ADC);
- • to enhance the S/N (signal-to-noise ratio) prior to further signal processing;
- • to generate a digital, bus-compatible electrical output; or
- • to transmit measurement data for wireless applications.
1.1.2 Sensor development
- • Consumer electronics
- • Household products
- • Public transport, automotive
- • Process industry
- • Manufacturing, production
- • Agriculture and breeding industry
- • Medical instruments
- • Reduced prices: the price of sensors not only depends on the technology but also on production volume. Today, the price of a sensor runs from several ten thousands of euros for single pieces down to a few eurocents for a 100 million volume.
- • Miniaturization: the IC-compatible technology and progress in micromachining technology are responsible for this trend [2–4]. Pressure sensors belong to the first candidates for realization in silicon (early 1960s). Micro-ElectroMechanical Systems (MEMS) are gradually taking over many traditionally designed mechanical sensors [5–7]. Nowadays, solid-state sensors (in silicon or compatible technology) for almost every quantity are available, and there is still room for innovation in this area [8,9].
- • Smart sensing: the same technology allows the integration of signal processing and sensing functions on a single chip. Special technology permits the processing of both analogue and digital signals (“mixed signals”), resulting in sensor modules with (microprocessor compatible) digital output.
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Preface for the second edition
- Preface for the first edition
- 1. Introduction
- 2. Sensor fundamentals
- 3. Uncertainty aspects
- 4. Resistive sensors
- 5. Capacitive sensors
- 6. Inductive and magnetic sensors
- 7. Optical sensors
- 8. Piezoelectric sensors
- 9. Acoustic sensors
- Appendix A. Symbols and notations
- Appendix B. Relations between quantities
- Appendix C. Basic interface circuits
- Appendix D. Practical guideline and code examples
- Index
Frequently asked questions
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app