eBook - ePub
Orbital Mechanics and Formation Flying
A Digital Control Perspective
- 438 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Aimed at students, faculty and professionals in the aerospace field, this book provides practical information on the development, analysis, and control of a single and/or multiple spacecraft in space. This book is divided into two major sections: single and multiple satellite motion. The first section analyses the orbital mechanics, orbital perturbations, and attitude dynamics of a single satellite around the Earth. Using the knowledge of a single satellite motion, the translation of a group of satellites called formation flying or constellation is explained. Formation flying has been one of the main research topics over the last few years and this book explains different control approaches to control the satellite attitude motion and/or to maintain the constellation together. The control schemes are explained in the discrete domain such that it can be easily implemented on the computer on board the satellite. The key objective of this book is to show the reader the practical and the implementation process in the discrete domain.
- Explains the orbital motion and principal perturbations affecting the satellite
- Uses the Ares V rocket as an example to explain the attitude motion of a space vehicle
- Presents the practical approach for different control actuators that can be used in a satellite
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Topic
Physical SciencesSubtopic
Astronomy & Astrophysics1
Introduction
1.1 Introduction to the book
For the past 50 years, the orbital motion of a satellite has been studied and proved by the launch of different satellites into Space such as the Sputnik, the Gemini mission, and the Apollo mission. In addition, the spacecraft mechanics and control have been developed and used in classical, modern, intelligent, and adaptive control schemes. These advances in the areas of orbital mechanics and control allow the engineer to perform different maneuvers with a single satellite.
Using this knowledge, more complex and larger satellites are developed to satisfy certain mission requirements; also, these satellites require a rocket large enough that can carry them into Space. On the other hand, the invention of smaller satellites, weighing less than a 100 kg, can be used to perform the same mission goals as the larger satellites. These satellites carry a single instrument and are placed in the same orbit with a required separation distance. This group of satellites is known as a constellation or formation flying. A constellation can have any type of geometrical configuration. The advantage of a constellation is that the satellites can take different measurements at various points in the same orbit at the same time. This advantage allows the scientist to do more experiments at a single point; in addition, there is an opportunity to fit more than one satellite in a single rocket. Although, the sensors proposed for use in smaller satellites are not flight tested yet; it is possible to use them to navigate a constellation into the required formation.
The objective of this book is to take the reader into the development of the orbital and attitude motion of a satellite; in this way, the background information can be used to develop the equations of motion for a constellation. This book uses a practical approach to explain the orbital mechanics and control equations; in addition, all the control techniques applied to formation flying are specified in the discrete domain. Using the digital formulation, the code can be easily implemented in the computer onboard the satellite. There are books [1] [2], journal articles [3] [4] [5], and conference articles [6] that provide a more complete mathematical background for solving the equations and controlling a single satellite and a group of satellites in formation flying. The intention of this book is not to add more mathematical depth into the control system of a spacecraft; on the other hand, it shows the practical aspects of controlling a single satellite and formation flying.
1.2 Book division
Figure 1.1 shows the conceptual map explaining the book division. Before developing any type of formulations, Chapter 2 provides an explanation of orbital mechanics. In this chapter, the motion of a single spacecraft in the orbit is explained. In Chapter 3, the orbital perturbations that affect the motion of the satellite in orbit are explained. The main perturbations that are defined are the perturbations due to the Earth and Sun. Chapter 2 and 3 explain the translational motion of the vehicle without and with disturbances.
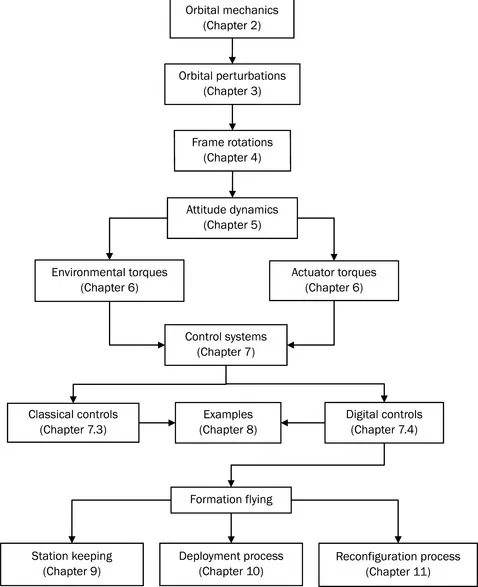
Figure 1.1 Conceptual map of the book
To begin explaining the attitude motion of the vehicle, the frame transformations are explained in Chapter 4. These frame transformations are important to explain the rotation from a reference to a body frame in the satellite. In Chapter 5, the attitude dynamics are explained based on the formulation of the angular momentum equations, Lagrange equations, quaternions, and the quasi-coordinates. All these equations explain the orientation of the spacecraft about the center of mass of the satellite. After describing its motion, there are two types of applied torques acting on the satellite; and in Chapter 6, the environmental and actuator torques are explained. The environmental torques are the outside forces that cause disturbances to the orientation of the satellite. The actuator torques define the forces applied along the body of the satellite to cause a rotation to correct the orientation of the vehicle.
These environmental and actuator torques provide a formal introduction to control systems. Control systems are used to correct the translational and attitude motion of a vehicle. These control systems are divided into two big sections which are the classical and modern control systems. The classical control systems are described by known techniques that are continuous in the time domain. Once the control system is expressed in the computer, the control system is defined in the discrete domain which is known as the modern controls. In classical and modern controls, the techniques are similar; but the main difference is a sampling time used to describe how long the system holds to collect one sample of data. In this chapter, the difference in continuous and discrete control is expressed in terms of this sampling time. Before wrapping up this chapter, Chapter 8 takes on a single example based on a small satellite to explain many of the techniques in Chapter 7.
Chapter 1 through 6 explain the motion of a single satellite in orbit; but Chapter 9 through 11 explain formation flying. Chapter 9 explains the translational dynamics of a pair of satellites in an elliptical orbit. This problem can be solved for a circular orbit, but the circular is one particular solution of the elliptical orbits. In this chapter, a control system is presented to take care of nonlinearities in the equations of motion defined by the disturbances due to the Earth oblateness and the solar pressure effects. Chapter 9 shows the station-keeping process of a satellite. To show the complexity of launching a constellation, the deployment and reconfiguration process is explained. The deployment procedure is shown in Chapter 10. This chapter uses very simple techniques to cause the satellite to depart from a near-Earth orbit to a highly elliptical orbit. Once the satellite reaches the apogee point of the transfer orbit, the station-keeping techniques shown in Chapter 9 are used to correct the orbital motion of the satellite. In Chapter 11, the reconfiguration procedure of the satellite is performed. The reconfiguration procedure changes the orbital dimensions of a satellite from one particular orbit to another. In this case, the reconfiguration procedure is performed with intelligent controllers and adaptive control schemes. These controllers can be easily implemented in real time because they are defined in the discrete domain; but these controllers provide an interesting approach to control the satellite by ‘taking decisions’ and ‘learning from its errors’. These techniques can be used to achieve the reconfiguration procedure of a constellation.
As shown in Figure 1.1, the book is divided to provide the reader with clear information about the application of orbital mechanics, actuators, and control systems to a single satellite and formation flying. Hence, this information allows the reader to develop and control either a single satellite or a constellation.
1.3 References
[1] Alfriend, Kyle T., Vadali, Srinivas R., Gurfil, Pini, How, Johnathan P., Breger, Louis S. Spacecraft Formation Flying: Dynamics, Control, and Navigation, 1st ed, Cambridge, UK: Elsevier Ltd, 2010.
[2] Schaub, Hanspeter, Junkins, John L.Analytical Mechanics of Space Systems. Reston, Virginia, USA: AIAA Education Series, 2003.
[3] Schaub, Hanspeter, Vadali, Srinivas R., Junkins, John L., Alfriend, Kyle T. Spacecraft Formation Flying Control Using Mean Orbital Elements. The Journal of the Astronautical Sciences. January–March 2000; 48(1):69–87.
[4] Carpenter, Russell J., Alfriend, Kyle T. Navigation Accuracy Guidelines for Orbital Formation Flying. The Journal of the Astronautical Sciences. April–June 2005; Vol. 53(Issue no. 2):207–219.
[5] Carter, T., Humi, M. Fuel-Optimal Rendezvous Near a Point in General Keplerian Orbit. Journal of Guidance, Control and Dynamics. November–December 1987; Vol. 10(Issue no. 6):567–573.
[6] Vadali, S.R., Vaddi, S.S., Alfriend, K.T., A New Concept for Controlling Formation Flying Satellite Constellations. AAS/AIAA Space Flight Mechanics Meeting. 2001. [Santa Barbara, California, February 11–14, AAS 01–218].
2
Two body orbital motion
Abstract:
Orbital mechanics is the study of the motion of planets and satellites in Space. In order to understand this motion, the Lagrange’s equations are explained to determine the equations of motion for a body. In addition, the motions of a single and a system of particles are define...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Dedication
- List of figures
- List of tables
- List of symbols
- Acknowledgements
- Preface
- About the authors
- Chapter 1: Introduction
- Chapter 2: Two body orbital motion
- Chapter 3: Orbital perturbations in the two body motion
- Chapter 4: Frame rotations and quaternions
- Chapter 5: Rigid body motion
- Chapter 6: Environmental and actuator torques
- Chapter 7: Continuous and digital control systems
- Chapter 8: Example
- Chapter 9: Formation flying
- Chapter 10: Deployment procedure for a constellation
- Chapter 11: Reconfiguration procedure for a constellation
- Appendix: Formulae relating to orbital mechanics
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Orbital Mechanics and Formation Flying by P A Capó-Lugo,P M Bainum in PDF and/or ePUB format, as well as other popular books in Physical Sciences & Astronomy & Astrophysics. We have over 1.5 million books available in our catalogue for you to explore.