![]()
Chapter 1
Introduction
I find that the harder I work, the more luck I seem to have.
Thomas Jefferson (1743–1826)
1.1 What is predictive dynamics?
Predictive dynamics is a term coined to characterize a new methodology for predicting human motion while considering dynamics of the human and the environment…the laws of physics must be obeyed. Whereas kinematics is the study of motion (position, velocity, and acceleration) without forces and torques, dynamics is the study of motion of bodies with all external and internal forces taken into consideration.
For every motion affected by physics, there are laws that govern that motion. These laws have undergone the test of time, have sent people to the moon, and have been implemented into every computer program that calculates the motion of a given system. Equations that represent motion are called the equations of motion. For large redundant systems such as the human body, these equations become very complicated nonlinear coupled differential equations subject to various algebraic constraints on the motion; hence the term often used to represent these equations is differential algebraic equations (DAEs).
For a complicated system of segments, such as for a human being, which is made up of joints and rigid links (we assume rigidity of human bones), the formulation for multi-body dynamics becomes large and complex. Solving the consequent system of equations is almost impossible. Indeed, for structural systems with limited number of degrees of freedom, integrators have been developed to solve the problem iteratively. For a highly nonlinear system with a large number of degrees of freedom, however, integrators come to a halt.
For many years, our research at the Virtual Soldier Research (VSR) program has focused on a method that employs optimization with dynamics to predict human motion. Recent results have demonstrated significant promise for resolving the problem of predicting human motion while taking into consideration external forces, obstacles, physiology, and most importantly the equations of motion. Inducing natural behavior is a natural result of this method.
This method, which we call predictive dynamics (PD), provides a way to address the issue of predicting human motion in a general manner. It addresses problems where both the motion of the system and the forces causing the motion are unknown and must be determined simultaneously. It will be seen that an optimization-based formulation is ideally suited to solve such problems. Recent results have shown that this method is applicable to gait prediction, lifting movements, pushing and pulling movements, climbing, and many other tasks. Indeed, an entire task made up of multiple sub-tasks can be created whereby a true physics-based predictive human simulator is created.
The objective of this book is to clearly demonstrate the basic formulation needed to develop a PD task.
1.2 How does predictive dynamics work?
Predictive dynamics is an optimization-based method for predicting human motion, while taking into consideration the biomechanics, physics of the motion, and human behavior.
Consider a general optimization problem, for which there are three main ingredients (Arora, 2012):
1. A set of design variables, which in our case are the joint profiles (i.e., joint angles as functions of time) and the torque profiles at each joint
2. Multiple cost functions to be optimized, which are human performance measures that represent functions that are important to accomplishing the motion (e.g., energy, speed, joint torque, etc.), and
3. Constraints on the motion (e.g., collision avoidance, joint ranges of motion, etc.).
This general optimization problem is readily solved using existing optimization algorithms and codes. The field of optimization is mature and many such codes exist that have been verified and validated, and tested with many different complex problems.
Solving the above optimization problem predicts human motion as illustrated in Figure 1.1. It has been shown that for static postures (i.e., predicting final human postures to reach an object), this method is very successful; it produces human-like results (Abdel-Malek et al., 2001a–d; Abdel-Malek et al., 2004a–c; Abdel-Malek et al., 2006).
Figure 1.1 Santos® the human model reaches to a point using two different strategies as a result of predicting postures.
Now we add the issue of dynamics. We are interested in seeing how human motion is predicted for scenarios that involve dynamic influences including but not limited to external loads, obstacles, and running. The general concept is the addition of the laws of physics, i.e., equations of motion, as constraints. Instead of calculating specific static postures, we now calculate time-varying angles for each joint in the body, which are also called motion profiles. Instead of a simple displacement cost function, we implement an energy and effort driving performance measures, which drive the motion to minimize these two measures. This is indeed the essence of our theoretical framework…we believe that humans act and move because humans want to minimize or maximize certain objectives. This approach yields natural human motion, induces behavior, and provides for a straightforward method of “predicting” the dynamics of the motion.
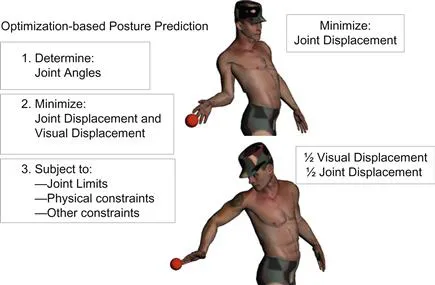
Figure 1.2 depicts the general optimization-based algorithm. The goal is to determine joint profiles, meaning the angles subtended by each body segment as a function of time. The second optimization formulation ingredient is one or more cost functions. In this case, we have selected energy and effort, assuming that both of these human performance measures can be transcribed into mathematical functions. The third ingredient is the same as shown in Figure 1.1; however, we have added an additional important constraint, namely the equations of motion. These are the laws of motion that govern how our world behaves dynamically.
Figure 1.2 The general formulation for PD illustrated as a three-step optimization formulation.
In general, we consider any case where a human segment is undergoing motion that warrants the consideration of masses and moments of inertia. PD can incorporate such general cases.
1.3 Why data-driven human motion prediction does not work
We firmly believe that the data-driven approach to human motion prediction is the wrong approach. Thousands of experiments are typically done to capture a few motions. These motions are then compiled into large tables with many parameters. The data is then analyzed and modeled as a nonlinear or functional regression model that should, in principle, predict motion. There are many obvious problems with this method, including:
• Difficulties in collecting the data for varying anthropometries. This includes the changes of masses, moments of inertia, muscle performance, and many other parameters for each person.
• Difficulties in managing a large number of parameters in a functional or nonlinear regression algorithm. A large number of parameters means a complex and less accurate model.
• Difficulties in predicting postures and motions for reaches that have obstacles. For each obstacle, the experiments must be repeated.
• Difficulties in predicting motions where dynamics (external forces and loads) play an important role.
After the apple fell from the tree on Newton’s head, he proceeded to measure a few more, came up with the general theory, and finally came up with a rigorous mathematical formulation for all falling objects and, furthermore, for all objects in motion. He did not measure every apple on every tree to come up with a theory that works and that is the fundamental basis for all motion in our universe.
The idea of recording every motion for thousands of people and for thousands of different scenarios does provide a good way to study motion and to validate motion predicted with various methods. However, it has no value for the prediction of motions beyond static postures.
1.4 Concluding remarks
This book deals with the science of human motion. It presents a rigorous methodology for representing human biomechanics and joint motion, and includes the effects of environmental physics on the motion. PD is a novel approach for simulating, specifically predicting, human motion. It avoids direct integration of differential-algebraic equations in order to create the resulting simulations for redundant digital human models. Cause and effect is at the center of this formulation…using a digital human environment, a user is able to model the human by selecting their anthropometry, body type, weight, strength, and fatigue limits. The user is also able to load the digital human model with various loads, for example perhaps inflict a biomechanical injury that would restrict a joint range of motion or lower the strength value of a particular group of muscles. Upon selecting a motion or a task, PD provides for a computational platform that lets us know the human reaction to these conditions…indeed, it answers the question: “How would the human have reacted if they were under these conditions?” It is a human simulator.
The book aims to illustrate the entire methodology beginning with a systematic method for modeling the kinematics, then creating an optimization formulation, writing the dynamics, and formulating the PD problem. Human performance measures are also introduced as cost functions (objective functions) that drive the motion, a theory that has been proven effective for producing natural motions. Such motion prediction capabilities have a wide variety of practical applications, such as in automotive industry, military, clinical and biomechanical analyses, and design of equipment. Several such applications are illustrated through detailed examples.
References
1. Abdel-Malek, K., Yu, W., Jaber, M., 2001a. Realistic Posture Prediction. 2001 SAE Digital Human Modeling and Simulation.
2. Abdel-Malek, K., Wei, Y., Mi, Z., Tanbour, E., Jaber, M., 2001b. Posture prediction versus inverse kinematics. In: Proceedings of the 2001 ASME Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Pittsburgh, PA, pp. 37–45.
3. Abdel-Malek K, Yang J, Brand R, Tanbour E. Towards understanding the workspace of the upper extremities. SAE Trans J Passenger Cars: Mech Syst. 2001c;110(6):2198–2206.
4. Abdel-Malek, K., Yu, W., Jaber, M., Duncan, J., 2001d. Realistic posture prediction for maximum dexterity. SAE Technical Paper 2001-01-2110. doi: 10.427/2001-01-2110.
5. Abdel-Malek K, Yang J, Brand R, Tanbour E. Towards understanding the workspace of human limbs. Ergonomics. 2004a;47(13):1386–1406.
6. Abdel-Malek, K., Yang, J., Yu, W., Duncan, J., 2004b. Human performance measures: mathematics. Proceedings of the ASME Design Engineering Technical Conferences (DAC 2004), Salt Lake City, UT.
7. Abdel-Malek K, Yang J, Mi Z, Patel VC, Nebel K. Human upper body motion prediction. Proceedings of Conference on Applied Simulation and Modeling (ASM) ...