eBook - ePub
The ROV Manual
A User Guide for Observation Class Remotely Operated Vehicles
- 320 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
The ROV Manual
A User Guide for Observation Class Remotely Operated Vehicles
About this book
The ROV Manual: A User Guide for Observation-Class Remotely Operated Vehicles is the first manual to provide a basic ""How To"" for using small observation-class ROVs for surveying, inspection and research procedures. It serves as a user guide that offers complete training and information about ROV operations for technicians, underwater activities enthusiasts, and engineers working offshore. The book focuses on the observation-class ROV and underwater uses for industrial, recreational, commercial, and scientific studies. It provides information about marine robotics and navigation tools used to obtain mission results and data faster and more efficiently. This manual also covers two common denominators: the technology and its application. It introduces the basic technologies needed and their relationship to specific requirements; and it helps identify the equipment essential for a cost-effective and efficient operation. This user guide can be invaluable in marine research and surveying, crime investigations, harbor security, military and coast guarding, commercial boating, diving and fishing, nuclear energy and hydroelectric inspection, and ROV courses in marine and petroleum engineering.*The first book to focus on observation class ROV (Remotely Operated Vehicle) underwater deployment in real conditions for industrial, commercial, scientific and recreational tasks *A complete user guide to ROV operation with basic information on underwater robotics and navigation equipment to obtain mission results quickly and efficiently *Ideal for anyone involved with ROVs complete with self-learning questions and answers
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Subtopic
RoboticsChapter 1 A Bit of History
1.1 INTRODUCTION
The strange thing about history is that it never ends. In the case of Remotely Operated Vehicles (ROVs), that history is a short one, but very important nonetheless, especially for the observation-class ROVs.
Two critical groups of people have driven ROV history: (1) Dedicated visionaries and (2) exploiters of technology. Those who drove the development of ROVs had a problem to solve and a vision, and they did not give up the quest until success was achieved. There were observation-class vehicles early in this history, but they were far from efficient. In time, however, the technology caught up with the smaller vehicles, and those who waited to exploit this technology have led the pack in fielding smaller, state-of-the-art ROVs.
This section will discuss what an ROV is, address some of the key events in the development of ROV technology, and address the breakthroughs that brought observation-class ROVs to maturity.
1.2 WHAT IS AN ROV?
Currently, underwater vehicles fall into two basic categories (Figure 1.1): Manned Underwater Vehicles and Unmanned Underwater Vehicles (UUVs). The US Navy often uses the definition of UUV as synonymous with Autonomous Underwater Vehicles (AUVs), although that definition is not a standard across industry.
According to the US Navy’s UUV Master Plan (2004 edition, section 1.3), an ‘unmanned undersea vehicle’ is defined as a:
Self-propelled submersible whose operation is either fully autonomous (pre-programmed or real-time adaptive mission control) or under minimal supervisory control and is untethered except, possibly, for data links such as a fiber-optic cable.
The civilian moniker for an untethered underwater vehicle is the AUV, which is free from a tether and can run either a pre-programmed or logic-driven course. The difference between the AUV and the ROV is the presence (or absence) of direct hardwire communication between the vehicle and the surface. However, AUVs can also be linked to the surface for direct communication through an acoustic modem, or (while on the surface) via an RF (radio frequency) and/or optical link. But in this book, we are concerned with the ROV.
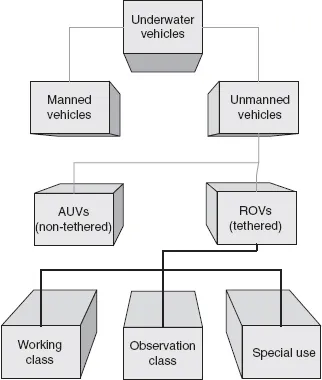
Figure 1.1 Underwater vehicles to ROVs.
Simplistically, an ROV is a camera mounted in a waterproof enclosure, with thrusters for maneuvering, attached to a cable to the surface over which a video signal is transmitted (Figure 1.2). Practically all of today’s vehicles use common consumer industry standards for commercial off-the-shelf (COTS) components. The following section will provide a better understanding of the scope of this definition.
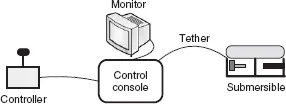
Figure 1.2 Basic ROV system components.
1.3 IN THE BEGINNING
One way to discuss the historical development of ROVs is to consider them in terms of the cycle of life – from infancy to maturity. Anyone who has raised a child will quickly understand such a categorization. In the beginning the ROV child was ‘nothing but a problem: Their bottles leaked, their hydraulics failed, sunlight damaged them, they were too noisy and unreliable, were hard to control and needed constant maintenance. Beginning to sound familiar?’ (Wernli, 1998).
Some have credited Dimitri Rebikoff with developing the first ROV – the POODLE – in 1953. However, the vehicle was used primarily for archeological research and its impact on ROV history was minimal – but it was a start.
Although entrepreneurs like Rebikoff were making technology breakthroughs, it took the US Navy to take the first real step to an operational system. The Navy’s problem was the recovery of torpedoes that were lost on the seafloor. Replacing a system that essentially grappled for the torpedo, the Navy (under a contract awarded to VARE Industries, Roselle, New Jersey) developed a maneuverable underwater camera system – a Mobile Underwater Vehicle System. The original VARE vehicle, the XN-3, was delivered to the Naval Ordnance Test Station (NOTS) in Pasadena, California, in 1961. This design eventually became the Cable-Controlled Underwater Research Vehicle (CURV).
The Navy’s CURV (and its successor – CURV III) made national headlines twice:
• The CURV retrieved a lost atomic bomb off the coast of Palomares, Spain in 1966, from 2850 feet (869 meters) of water, even though working beyond its maximum depth. The CURV’s sister vehicle, CURV II, is shown in Figure 1.3.
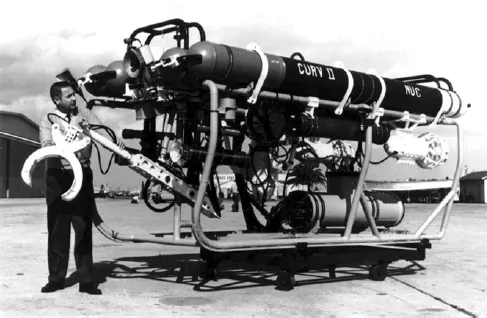
Figure 1.3 The Navy’s CURV II vehicle.
• CURV III, which had become a ‘flyaway’ system, was sent on an emergency recovery mission from San Diego to a point offshore, near Cork, Ireland in 1973. With little air left for the two pilots of the PISCES III manned submersible, which was trapped on the bottom in 1575 feet (480 meters) of water, the CURV III attached a recovery line that successfully pulled the doomed crew to safety.
With such successes under its belt, the Navy expanded into more complex vehicles, such as the massive Pontoon Implacement Vehicle (PIV), which was developed to aid in the recovery of sunken submarines, shown with the integrated Work Systems Package (WSP) (Figure 1.4).

Figure 1.4 Co-author R. Wernli (right) directs the launch of the US Navy’s WSP/PIV.
At the other end of the scale, the US Navy developed one of the very first small-size observation ROVs. The SNOOPY vehicle, which was hydraulically operated from the surface, was one of the first portable vehicles (Figure 1.5).

Figure 1.5 US Navy’s hydraulic SNOOPY.
This version was followed by the Electric SNOOPY, which extended the vehicle’s reach by going with a fully electric vehicle. Eventually sonars and other sensors were added and the childhood of the small vehicles had begun.
Navy-funded programs helped Hydro Products (San Diego, CA) get a jump on the ROV field through the development of the TORTUGA, a system dedicated to investigating the utility of a submarine-deployed ROV. These developments led to Hydro Products’ RCV line of ‘flying eyeball’ vehicles (Figure 1.6).

Figure 1.6 Hydro Products’ RCV 225 and RCV 150 vehicles.
These new intruders, albeit successful in their design goals, still could not shake that lock on the market by the manned submersibles and saturation divers. In 1974, only 20 vehicles had been constructed, with 17 of those funded by various governments. Some of those included:
• France – ERIC and Telenaute and ECA with their PAP mine countermeasure vehicles.
• Finland – PHOCAS and Norway – the SNURRE
• UK – British Aircraft Corporation (BAC-1) soon to be the CONSUB 01; SUB-2, CUTLET
• Heriot-Watt University, Edinburgh – ANGUS (001, 002, and 003)
• Soviet Union – CRAB-4000 and MANTA vehicles.
It could be said that ROVs reached adolescence, which is generally tied to a growth spurt, accented by bouts of unexplained or irrational behavior, around 1975. With an exponential upturn, the number of vehicles grew to 500 by the end of 1982. And the funding line also changed during this period. From 1953 to 1974, 85 percent of the vehicles built were government funded. From 1974 to 1982, 96 percent of the 350 vehicles produced were funded, constructed, and/or bought by private industr...
Table of contents
- Cover
- Title Page
- Copyright
- Dedication
- Foreword
- Preface
- Acknowledgements
- History and dedication
- Table of Contents
- Introduction
- Chapter 1: A Bit of History
- Chapter 2: ROV Design
- Chapter 3: Rov Components
- Chapter 4: Underwater Acoustics and Positioning
- Chapter 5: Sonar
- Chapter 6: Oceanography
- Chapter 7: Environment and Navigation
- Chapter 8: Homeland Security
- Chapter 9: Explosive Ordnance Disposal and Mine Countermeasures
- Chapter 10: Public Safety Diving
- Chapter 11: Commercial, Scientific, and Archeological
- Chapter 12: Standard Operating Procedures
- Chapter 13: Servicing and Troubleshooting
- Chapter 14: Putting it All Together
- Appendix A
- Bibliography
- Index
- Instructions for online access
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access The ROV Manual by Robert D Christ,Robert L. Wernli Sr,Robert L. Wernli, Sr in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Robotics. We have over 1.5 million books available in our catalogue for you to explore.