![]()
PART 1
Introduction
Motivation for Microbiorobotics
Historical Overview
About this Book
![]()
Motivation for Microbiorobotics
For much of the history of robotics, research has focused on systems that have some relation in operational capability or length scale to humans. From the perspective of the layperson, the very definition of robot is most often closely tied to the subclass of robotics relating to humanoids. Perhaps this is not particularly surprising, because the methods of machining and the tools that we first developed are correlated with our ability to easily observe and manipulate objects at macroscopic length scales. That is, with the naked eye we can easily see objects down to the millimeter, and our hands are not adept at working with smaller objects. It is also not surprising that we have developed strong capabilities for developing much larger structures such as bridges and skyscrapers. In a sense, the bottom of the scale limits engineers more than the top, and we can consider the largest structures to be considered “bottom-up,” a concept that is prevalent in nanotechnology. In the last decade, significant advances have been made in the field of microrobotics due to relatively recent advancements in both micromachining and microscopy. With the proliferation of several advanced tools for imaging and analysis, such as atomic force, electron, and confocal microscopies, coupled with the increasing availability of microfabrication technology, we can expect to see tighter integration between fundamental discovery and engineering applications.
Experimentalists in microscale robotics are inevitably led to consider two fundamental questions. Firstly, what can we learn from cells in terms of mimicking or integrating natural phenomena with robots? Secondly, how can we apply new microrobotic technologies to the fields of cell biology and medicine?
Cells are, in a sense, highly optimized and specialized microrobots. If we look at the function of a cell from the perspective of a beginning robotics course, we find striking analogs between cells and robots. Motor proteins perform as actuators, neurons and ion channels act as wiring, DNA and RNA act as memory and software, etc. The cellular systems are composed of elements that are self-assembled in the truest, atomistic sense from the bottom-up. Proteins are the functional subunit of the cellular machinery, assembled into myriad actuators and sensors. In the current state of micro- and nanorobotics, we either mimic behaviors that are otherwise performed by these proteins or we use whole, intact cells. For example, the behavior of the flagellum is currently replicated not by proteins, but by external magnetic fields [1, 2], and the sensing of chemical compounds may be interfaced with mechanical measurements and solid-state microelectronics [3]. In the long view, however, it is only reasonable to expect that cellular subsystems will be successfully integrated with microfabricated, inorganic elements. Indeed, there is a significant progress being made in the effort to harness the power of motor proteins as microactuators.
The branches of bioengineering related to genetic engineering and synthetic biology will also inevitably be interfaced with microbiorobotics, from both the standpoint of sensors and actuators, or even combinations. In the field of optogenetics, we see a step toward this combination, the coupling of light exposure with muscle actuation [4]. If we are willing to expand our definition of robotics, another viable option is to reprogram whole cells to suit our needs. Bacterial and yeast cells have been reprogrammed to perform basic operations such as counting and timing [5, 6].
One of the great challenges in microrobotics is expanding the current control capabilities from single- or few-robot systems to many-robot systems. Because many of the current techniques are field based, it is no small task to accomplish. That is, individual control is limited by the divergence or resolution of the applied fields. In many current systems, sensing and control are performed at a much larger scale using the microscope as an interface. Despite the current limitations on the ability to create systems of independent microrobots, it is easy to imagine how such capabilities would greatly enable otherwise difficult tasks, such as the collective propulsion of large objects relative to the robot size, or collecting data from disparate locations.
From the biomimetic point of view, multirobot systems seem like an obvious step along the continuum of technological advancement. Although there are certainly countless examples of microorganisms that go about their life cycle in a largely independent manner, there are also many examples of single-cell organisms that demonstrate collective behaviors, such as swarming bacteria [7].
Passive, circulating multirobotic systems can also easily be envisioned. Although much of the focus to date has been on actuation methods, sensing networks of passively flowing, perhaps even communicating robots. For instance, leukocytes detect and defend against infection in the human body. Although many of these cells circulate freely in the blood, they are able to sense and respond to foreign bodies. One can imagine another layer of robotic protection tasked with monitoring or even responding to disease.
As described, there are clearly myriad options for fundamental study on several levels with direct applicability to microbiorobotics. Although the fundamental research by itself serves to motivate the subject as a whole, the application of microbiorobots to cellular research, drug delivery, or as working tools for other microscale tasks should prove to be fascinating.
References
1. Zhang L, et al. Artificial bacterial flagella: fabrication and magnetic control. Appl Phys Lett. 2009;94 064107-064107-3.
2. Ghosh A, Fischer P. Controlled propulsion of artificial magnetic nanostructured propellers. Nano Lett. 2009;9:2243–2246.
3. Lavrik NV, Sepaniak MJ, Datskos PG. Cantilever transducers as a platform for chemical and biological sensors. Rev Sci Instrum. 2004;75:2229–2253.
4. Bruegmann T, et al. Optogenetic control of heart muscle in vitro and in vivo. Nat Methods. 2010;7:897–900.
5. Friedland AE, et al. Synthetic gene networks that count. Science. 2009;324(5931):1199–1202.
6. Ellis T, Wang X, Collins JJ. Diversity-based, model-guided construction of synthetic gene networks with predicted functions. Nat Biotechnol. 2009;27(5):465–471.
7. Copeland MF, Weibel DB. Bacterial swarming: a model system for studying dynamic self-assembly. Soft Matter. 2009;5:1174–1187.
![]()
Historical Overview
In recent years, there has been an increasing interest in the development of microscale robotic systems. Researchers have explored numerous ways and techniques to provide capable systems for microscale tasks. Many microscale systems have been biologically inspired or based. For effective microscale systems, it is critical to understand cellular mechanics and its interaction with low Reynolds number environments. Cellular swimming has led researchers to mimic biological motors such as flagella for bacteria-inspired microrobots. Others have used biological phenomena and external stimuli for microscale robotic systems such as magnetotactic bacteria. Using bacteria as well as other microorganisms as a power source for a microrobot has also been investigated. Furthermore, mathematical modeling has been used to characterize cell behavior for the control of microbiorobotic systems. Microbiorbotics has vast potential for creating robust microscale robotic systems.
Low Reynolds number swimming
The first step to building microscale robotic systems is to understand fluid mechanics at low Reynolds numbers. In low Reynolds numbers, viscosity is the dominating force, as inertia plays no role whatsoever. Motion at very low Reynolds number is entirely determined by the forces exerted on the organism at that moment and by nothing in the past [1]. Purcell’s scallop theorem says that to achieve propulsion at low Reynolds numbers, reciprocal motion cannot be used. Purcell describes reciprocal motion as, “I change my body into a certain shape and then I go back to the original shape by going through the sequence in reverse. So, if the animal tries to swim by a reciprocal motion, it can’t go anywhere [1].” The scallop theorem forms the basis of aquatic locomotion for microswimming devices [2].
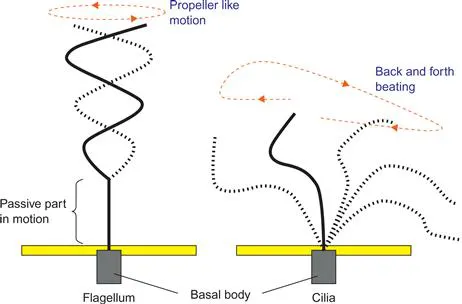
To create efficient propulsion at low Reynolds numbers, the mechanics of biological motors such as flagella and cilia have been examined. Many bacteria, such as Escherichia coli and Salmonella, have several flagella attached at points distributed over the surface of the cell. The flagella, which are typically helical shaped, rotate in a corkscrew-like motion. While bacteria are swimming, the flagella come together in a synchronous flagellar bundle, which propels the cell [3]. For microorganisms with cilia, such as Tetrahymena pyriformis and Paramecium, the locomotive cilium motion can be described in terms of two swimming strokes, effective (forward) and recovery (back). The cilia are aligned in arrays along the cell body and beat in a phase relationship with neighboring cilia [4]. The mechanics of flagella and cilia are shown in Figure 1. These biological motors are efficient in low Reynolds number environments and are a source of inspiration for microbiorobotics.
Figure 1 The swimming motion of bacterial flagellum and cilium.
Source: Copyright from[31].
Taxis of microorganisms
For the control of microbiorobots for microscale applications, external stimuli can be utilized. Many biological microorganisms respond to stimuli such as magnetotaxis (magnetic fields), galvanotaxis (electric fields), phototaxis (light), and chemotaxis (chemicals). Based on the characterized behavior of microorganisms, these taxes can be applied to produce a desired response from the microscale robot. Responses from microbiorobots can be used as a method for chemical detection [5] or the manipulation of objects [6].
Magnetotaxis is used to change the direction of locomotion in motile organisms by inducing a magnetic stimulus. Two different magnetotactic mechanisms, polar and axial, are found in different magnetotactic bacterial strains [7]. Strains that swim in only one direction along the magnetic field are polar magnetotactic. These magnetotactic bacteria always swim towards either the north or south direction of the magnetic field and will only reverse direction if exposed to a more powerful magnetic field. They always move in the same magnetic direction,...