eBook - ePub
Map Projection Transformation
Principles and Applications
- 384 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
With the advance of science and technology, there have been breakthroughs in the field of classical research and methods of map projection. Among these, computer science and space science have had the greater influence upon the field of research and the formation of a working body of map projection, developing them in breadth and depth.
This book reflects several aspects of the development of modern mathematical cartography, especially the theory and methods of map projection transformation. Map projection transformation is an area of research in mathematical cartography newly developed over the last 25 years. It is widely used in surveying and computer-assisted cartography, data processing for information systems, and the transformation of data from space, remote sensing, and other space sciences. The development of map projection transformation not only expands new areas of research on mathematical cartography, but it also further develops the applied area with the creation and application of map projection transformation software and mapping mathematics bases on the computer.
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information





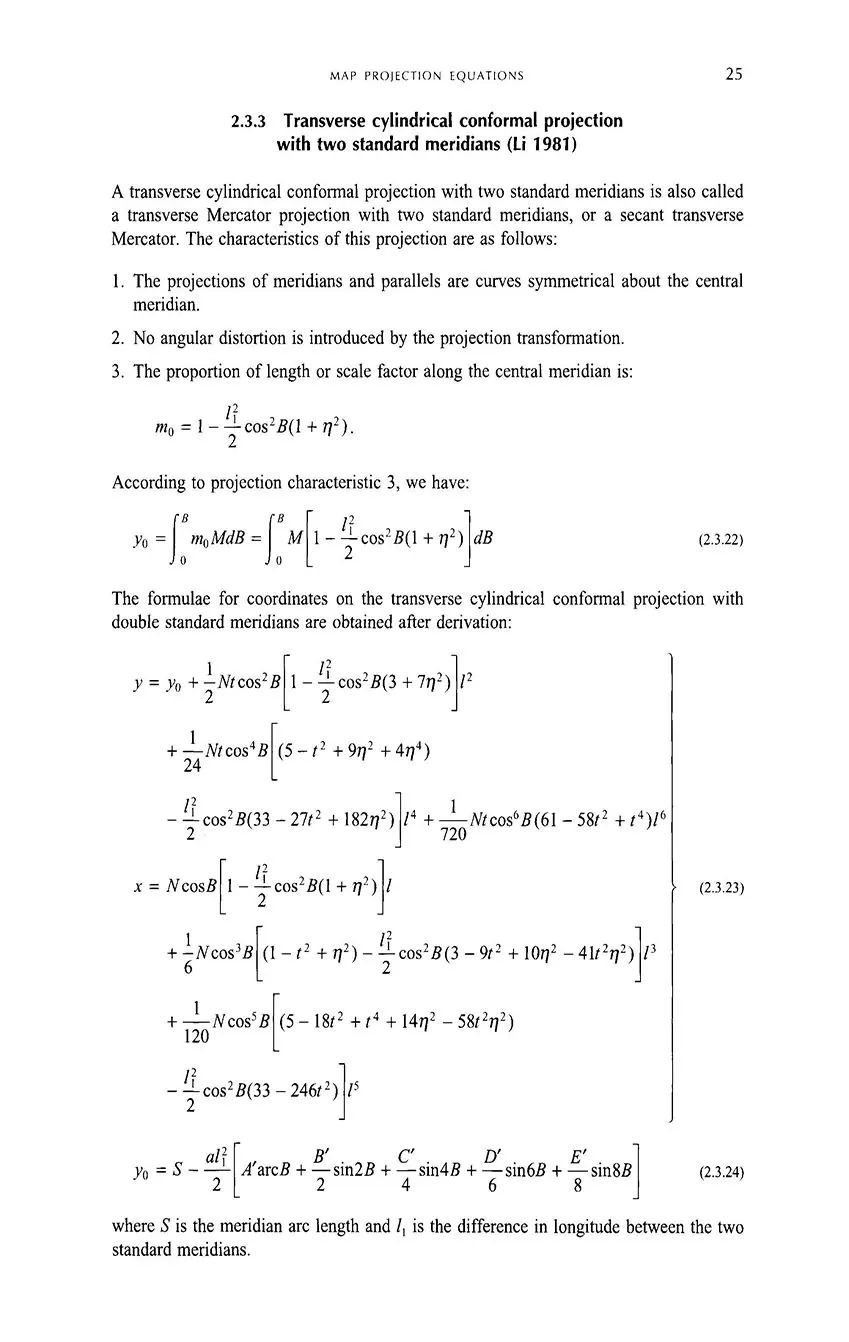



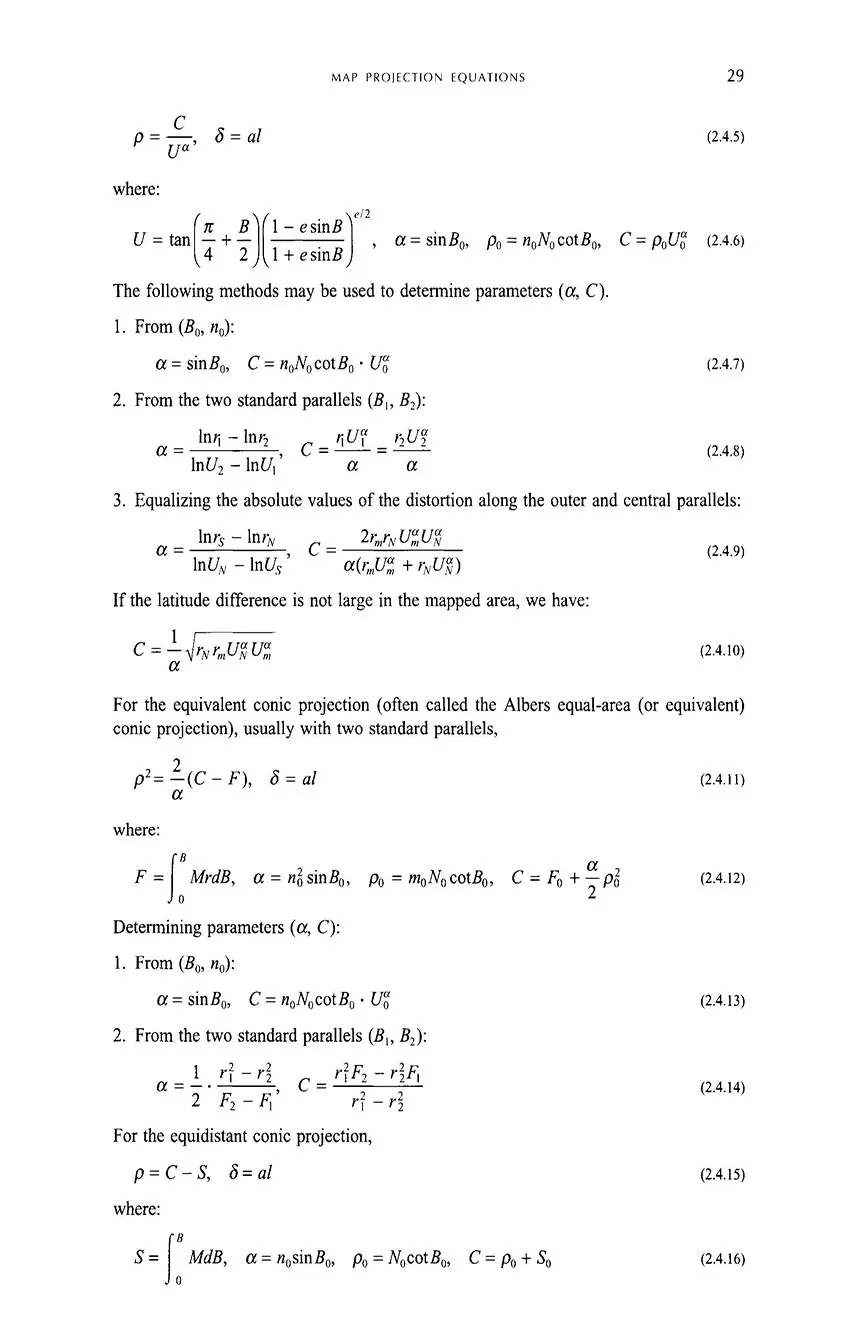

Table of contents
- Cover
- Half Title
- Title Page
- Copyright Page
- Contents
- Symbols
- Preface
- Introduction
- 1 Fifty Years' Advancement of Map Projection Study in China
- 1.2 General theory of map projection
- 1.3 Exploration of new types of map projection
- 1.4 Selection of map projection and its application
- 1.5 Theory and application of map projection transformation
- 1.6 Continuous development of new research and applications to the field of map projection
- 2 Map Projection Equations
- 2.1 Earth ellipsoid and sphere
- 2.2 Azimuthal projections
- 2.3 Cylindrical projections
- 2.4 Conic projections
- 2.5 Pseudoazimuthal projections
- 2.6 Pseudocylindrical projections
- 2.7 Pseudoconical projections
- 2.8 Polyconical projections
- 2.9 Other types of projections
- 2.10 Projection from the ellipsoid to the sphere
- 2.11 Space map projection
- 2.12 Chinese topographic maps
- 3 General Theory of Map Projection Transformation
- 3.1 Research objectives and basic methods
- 3.2 Equations for map projection transformation
- 3.3 Plane feature transformation
- 3.4 Coordinate systems on the surfaces of the ellipsoid and sphere
- 3.5 Three kinds of latitude functions q, S, F on the surface of the ellipsoid
- 3.6 Inverse transformation of q, S, F- iteration method
- 3.7 Inverse transformation of q, S, F- trigonometric series method with constant coefficients
- 3.8 Inverse transformation of q, S, F- Taylor series method with varied coefficients
- 3.9 Inverse transformation of q, S, F- numerical methods
- 3.10 Transformation formulae among six kinds of latitudes
- 3.11 Commonly used power series in map projection transformation
- 4 Analytical Transformation
- 4.1 Azimuthal projection
- 4.2 Cylindrical projection
- 4.3 Conic projection
- 4.4 Transformation among azimuthal, cylindrical and conic projections
- 4.5 Pseudoazimuthal, pseudocylindrical and pseudoconic projections
- 4.6 Polyconic projection
- 4.7 Double projection
- 5 Analytical Transformation for Conformal Projection
- 5.1 General model for conformal projection transformation
- 5.2 Direct transformation between two conformal projections
- 5.3 Direct transformation of conformal projections
- 5.4 Inverse transformation of conformal projections
- 5.5 Conformal oblique cylindrical and oblique conic projections
- 6 Numerical Transformation
- 6.1 General polynomial approximations
- 6.2 Refining parallels and meridians
- 6.3 Orthogonal polynomial approximation
- 6.4 Accuracy considerations in numerical transformation
- 7 Numerical Transformation for Conformal Projection
- 7.1 Conformal polynomial approximation
- 7.2 Interpolation
- 7.3 Difference method
- 7.4 Finite element method
- 8 The Third Type of Coordinate Transformation
- 8.1 Principle and applications
- 8.2 Transverse Mercator (or Gauss-Krüger) projection
- 8.3 Conformal projections
- 8.4 Linear interpolation
- 8.5 Spherical coordinates
- 9 Zone Transformation for the Transverse Mercator(Gauss-Krüger) Projection
- 9.2 Indirect transformation
- 9.3 Direct transformation
- 9.4 Plane coordinate network transformation between adjacent zones
- 9.5 Application of double projection
- 10 New Map Projections
- 10.1 Affine transformation of equal-area projections and seeking of modified equal-area projections (Yang 1992)
- 10.2 Linear transformation of the gnomonic projection and seeking the double-azimuthal projection (Yang 1990b)
- 11 Variable-scale Map Projections
- 11.1 Variable-scale projections
- 11.2 Composite projections
- 12 Position Lines
- 12.1 Types of position lines and their projection
- 12.2 Determining the position of a target
- 13 Spatial Information Positioning Systems
- 13.2 Mapping and image positioning system
- 13.3 Registration model (map projection system)
- 13.4 Data processing of a digital map
- 13.5 Automatically setting up map mathematical foundation
- Appendices
- Appendix 1 Inverse Transformation of Algebraic Series
- Appendix 2 Constant Coefficient Tables of Zone Transformation for the Gauss-Krüger Projection
- Appendix 3 Examples of Numerical Transformation
- Appendix 4 Transformation for the Mathematical Elements of Topographic Maps
- Appendix 5 The Position Line and Position Navigation Software System
- Appendix 6 Bibliography of Chinese Literature on Map Projections and Other References
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Map Projection Transformation by Qihe Yang,John Snyder,Waldo Tobler in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Civil Engineering. We have over one million books available in our catalogue for you to explore.