Classical Feedback Control with Nonlinear Multi-Loop Systems
With MATLAB® and Simulink®, Third Edition
- 574 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
Classical Feedback Control with Nonlinear Multi-Loop Systems
With MATLAB® and Simulink®, Third Edition
About this book
Classical Feedback Control with Nonlinear Multi-Loop Systems describes the design of high-performance feedback control systems, emphasizing the frequency-domain approach widely used in practical engineering. It presents design methods for high-order nonlinear single- and multi-loop controllers with efficient analog and digital implementations. Bode integrals are employed to estimate the available system performance and to determine the ideal frequency responses that maximize the disturbance rejection and feedback bandwidth. Nonlinear dynamic compensators provide global stability and improve transient responses. This book serves as a unique text for an advanced course in control system engineering, and as a valuable reference for practicing engineers competing in today's industrial environment.
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information
1
Feedback and Sensitivity
1.1 Feedback Control System
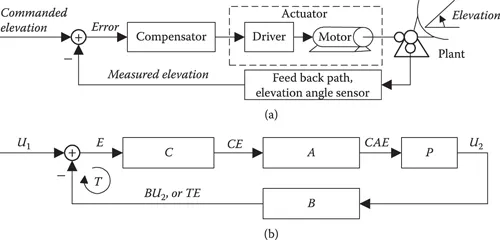
Single-loop feedback system.
| (1.1) |
| (1.2) |

Joystick control of a steering mechanism.

Phase-locked loop.
Table of contents
- Cover
- Half-Title
- Series
- Title
- Copyright
- Contents
- Preface
- To Instructors
- Authors
- 1 Feedback and Sensitivity
- 2 Feedforward, Multi-Loop, and MIMO Systems
- 3 Frequency Response Methods
- 4 Shaping the Loop Frequency Response
- 5 Compensator Design
- 6 Analog Controller Implementation
- 7 Linear Links and System Simulation
- 8 Introduction to Alternative Methods of Controller Design
- 9 Adaptive Systems
- 10 Provision of Global Stability
- 11 Describing Functions
- 12 Process Instability
- 13 Multiwindow Controllers
- 14 Nonlinear Multi-Loop Systems with Uncertainty
- Appendix 1: Feedback Control, Elementary Treatment
- Appendix 2: Frequency Responses
- Appendix 3: Causal Systems, Passive Systems and Positive Real Functions, and Collocated Control
- Appendix 4: Derivation of Bode Integrals
- Appendix 5: Program for Phase Calculation
- Appendix 6: Generic Single-Loop Feedback System
- Appendix 7: Effect of Feedback on Mobility
- Appendix 8: Regulation
- Appendix 9: Balanced Bridge Feedback
- Appendix 10: Phase-Gain Relation for Describing Functions
- Appendix 11: Discussions
- Appendix 12: Design Sequence
- Appendix 13: Examples
- Appendix 14: Bode Step Toolbox
- Appendix 15: Nonlinear Multi-Loop Feedback Control (Patent Application)
- Bibliography
- Notation
- Index
Frequently asked questions
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app