- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Motion Capture in Performance explores the historical origins, properties and implications of Motion Capture. It introduces a new mode of performance for the commercial film, animation, and console gaming industries - 'Performance Capture', a distinct interdisciplinary discourse in the fields of theatre, animation, performance studies and film.
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information
1
Infrastructure
Abstract: This chapter provides an examination of the existing infrastructure(s) of Motion Capture (MoCap) facilities and technologies. It draws on established primary texts to begin a constructed historical perspective of MoCap and interrogates principles particular to animation that inevitably clash with performance. These texts focus on the principles and workflow of MoCap and are presented as ‘how to’ guides for animators. They are used here to demonstrate the ongoing privilege of tool over the form, so often found in commercial studios, where the MoCap system, workflow and captured movement data is a primary focus and the direction of performance is secondary.
Delbridge, Matt. Motion Capture in Performance: An Introduction. Basingstoke: Palgrave Macmillan, 2015. DOI: 10.1057/9781137505811.0007.
In order to fully explore the infrastructure of the MoCap environment we have to understand what is physically in the space, including how it came to be there and who uses it. This examination of MoCap infrastructure involves the historical development of devices that have led to current MoCap systems and the ways that these systems are set up, operated, maintained and used.
The physical infrastructure(s) discussed here conform to the studio environments detailed in the most commonly used texts available to explore the practical principles of MoCap. These texts are Liverman’s Motion Capture Guide (2004), Kitagawa and Windsor’s MoCap for Artists (2008), Alberto Menache’s Understanding Motion Capture for Computer Animation (2010), and Ricardo Tobon’s The MoCap Book (2010). Here I draw predominantly from MoCap for Artists and the Motion Capture Guide as the most widely used and applied in animation training (to varying degrees of success). Each ‘how to’ actively provides insight into the historical development of MoCap and serves as a reference point to the various MoCap infrastructures available. As the primary concern is to interrogate how effective the processes for capturing performance are, and whether they can be improved, there are several assertions made in these guides that are challenged. The most fundamental of these is that the principles prescribed in these manuals overtly privilege the experience of the animator in the process of MoCap and discreetly (yet significantly) minimise the experience of the performer, director and operator.
Early motion capture and rotoscoping
The earliest forms of Motion Capture existed before the digital and can be attributed to three photographic pioneers: Edward Muybridge, Etienne-Jules Marey and Harold Edgerton. The Muybridge contribution is commonly cited as the precursor to contemporary filmmaking and animation, and was achieved by a dozen cameras in an array taking sequential photos triggered by the movement of a horse’s feet. This iconic image was generated by a series of frames captured in sequence by the camera array as a commission to settle a bet for Leland Stanford over whether a horse in a canter had all four feet off the ground at any one time. It is the first surviving optic/mechanic record of captured movement, or, more precisely, the capture of movement over a determined period of time. Muybridge later invented the zoopraxiscope (1879), a device that projected sequential images printed onto disks in fast succession; this is also considered to be one of the earliest motion picture devices. Muybridge’s texts Animals in motion (1899) and The Human Figures in motion (1901) are still used by students of anatomy, animation and filmmaking today.
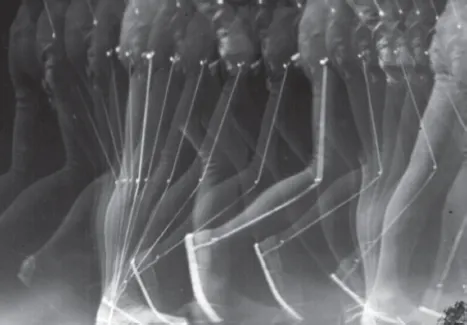
FIGURE 1.1 Marey’s MoCap suit (Image: E. Marey, 1884)
In 1882, Etienne Jules Marey met Muybridge in Paris and was inspired to invent the chronophotographic fixed plate camera that housed a timed shutter enabling him to capture multiple images onto a plate. This device was similar to Muybridge’s zoopraxiscope, but when Marey used his recording device in conjunction with a special suit designed to allow a plotted record of human movement to be extracted from the image sequence, he set the scene for our contemporary version of MoCap.
The last of the three pioneers, Harold Edgerton perfected his own version of the lighting instrument known as the stroboscope (or strobe) in the 1930s. While the strobe light had been in development since the 1830s, Edgerton’s innovation was his ability to use electronics to match his flashing light to the revolution of a rotary motor so that it appeared stationary. That Edgerton further developed his strobe to be used as a flashing light to photograph fast moving objects on film was a byproduct of the initial purpose of the electronic stroboscope in the maintenance and testing of rotating machine parts. When used in conjunction with photography, however, his advances in stroboscope technology did provide a primary step in the development of contemporary optical MoCap.1
Max Fleischer, rotoscoping and Disney
Rotoscoping was first developed by Max Fleischer, the creator of the cartoons Betty Boop (1930) and Popeye (1933). It was later exploited in feature films by Disney studios, with the first animated feature to use rotoscoping, Snow White and the Seven Dwarves (1937). At its inception, rotoscoping was the process of tracing around individual frames of traditional film to be repurposed and coloured as animation. Fleischer developed several experimental films using his rotoscoping technique with himself in real life, but it was Disney that pioneered the use of rotoscoping to become a study of human and animal movement. It is little known that in both Snow White (1937) and Bambi (1942) there are several sequences of live action footage where rotoscoping is used to generate what looks like completely hand-drawn images.2
While medical and military research into digital MoCap began as early as the 1970s, there was no impact on the industry of Computer Generated Imagery (CGI) until the mid 1980s, and even then the technology met with little impact. The first commercial application of what can be described as 3D animation was for a commercial of a cleaning product aired as part of the Superbowl in 1985. The commercial called Brilliance (1985) depicted a female robot that moved like a real person. The producers of the commercial developed their own form of MoCap to give the robot lifelike qualities. Brilliance was acclaimed for its startling attention to the lifelike attributes of the animated robot and heralded the beginning of the commercial MoCap industry we know today.
Workflow, performance and the 12 basic stages of animation
The 12 principles of animation are: Anticipation, Arcs of Motion, Ease In and Ease Out, Exaggeration, Follow Through and Overlapping Action, Secondary Action, Squash and Stretch, Staging, Timing, Solid Drawing (or Weight and Balance) and Personality (or Appeal).3
Anticipation is movement in the opposite direction before the main action starts. Arcs of Motion are where objects travel in an arc through space as opposed to a straight line. Ease In and Ease Out depicts where most objects start slow, accelerate to a constant and then slow down before stopping. Exaggeration dramatises a character’s emotions. Follow Through and Overlapping Action is the opposite of Anticipation, or what happens when movement comes to a stop. Squash and Stretch is the creation of weight, as in when a ball bounces it transforms into an oval shape when it hits the ground. Staging is the presentation of action and an idea in a clear fashion. Timing is the pace in which actions occur, specifically in relation to primary and secondary movements. Weight and Balance accounts for the distribution of a character’s weight such that it shifts correctly as the character moves. Personality is the intangible quality of the character – voice, appearance and actions.4
Matt Liverman suggests the animator working with MoCap will deploy these principles at varying stages of the animation process and breaks the use of these principles into three phases of an animators MoCap workflow: preparation; capture session; and post-capture.5 In the preparation phase (before entering the studio) he suggests Ease In/Out, Exaggeration, Follow Through, Staging, Timing and Personality are to be used by the animator in planning the characters, and the amount of movement required for the project. Most of what he suggests for the preparation phase is accurate. The Exaggeration and Personality of the character will be driven by the data captured. The Ease In/Out, Follow Through and Timing of movement required from the performer – particularly if the data captured is used for video game character movement (poses and actions), which need be returned to and repeated as game progression is controlled by the end user (or player). These are vital points to consider when directing performers in the studio and a particular art to be mastered in terms of directing action within this MoCap. However, when Liverman describes considerations for staging a scene in terms of the final frame of the camera position he neglects the most prominent advantage of using optical MoCap, that it will record the action of the performer globally in a volume of capture space.6
While Liverman rightly plans for the frame to be selected as part of an orthodox storyboard process, a vital step in the MoCap storyboard, he neglects to discuss that there needs to be prescribed sizes in capture volume for shifting from either a football game to an intimate scene. The contemporary animator is used to working in a 3D screen space with almost limitless parameters, but this is not the case in a MoCap studio where the size of the capture volume (the amount of space that the system can ‘see’) is duplicated in screen space. In light of traditional approaches, which fail to attend adequately to staging, I suggest that the planning of the performance to be captured must account for this spatial consideration.
In various descriptions MoCap directors are referred to as ‘motion coordinators’, and actors as ‘motion performers’. Liverman suggests roles should work together to contribute to the overall look of the captures (2004). While acknowledging several of the principles will occur naturally during the process, he notes the principles of Anticipation, Ease In/Out, Follow Through and Overlapping Action and Timing can be coached, if only slightly. As opposed to simply coordinating motion, which suggests nothing more than the traffic direction of pedestrian movement, performance captured using MoCap needs to be directed. In addition to this the motion performer does not simply supply movement they supply themselves. This concept, which I frame later as a contemporary application of Benjamin’s ‘aura’ (and its reproducibility) is central to this. A revised approach to thinking about performance captured, therefore, suggests that the standard method of performance and direction in MoCap studios is for the most part misunderstood from an animation perspective. The limitations of current ‘how to’ guides underline a primary motivation for asserting the performative experience central to MoCap, and challenges the dominant animation pedagogy around the training and preparedness of animators that will use and generate MoCap data. This pedagogy suggests that most data can be fixed and transformed in the post-capture phase; that all 12 animation principles can be reapplied to data generated in the studio; and the actor’s performance is significantly enhanced by the intervention of the animator.
Existing MoCap texts privilege technological processes, data management systems, animation pipeline options, and pre/post-production planning. Minimal reference is made to either the directorial or performative requirements that enable the effective capture of performance. All guides, while useful sources for the technical operation of a MoCap system, neglect the central aspect of the capture and direction of live performance. Those who understand what it means to direct and perform, entering the existing infrastructure of a standard MoCap studio will struggle to understand the primary role they occupy in a standard studio workflow. Current ‘how to’ texts do not question the workflow processes, what it means to generate performance for a ...
Table of contents
- Cover
- Title
- An Introduction
- 1 Infrastructure
- 2 Language
- 3 Space and the Frame
- 4 Tool Use and Time
- 5 Environmental Navigation
- Conclusion
- Bibliography
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Motion Capture in Performance by M. Delbridge in PDF and/or ePUB format, as well as other popular books in Media & Performing Arts & Art General. We have over one million books available in our catalogue for you to explore.