On-Board Design Models and Algorithm for Communication Based Train Control and Tracking System
- 124 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
On-Board Design Models and Algorithm for Communication Based Train Control and Tracking System
About this book
Railway systems have a long history of train protection and control, as to reduce the risk of train accidents. Many train control systems include automated communication between train and trackside equipment. But several different national systems are still facing cross-border rail traffic. Today, trains for cross-border traffic need to be equipped with train control systems that are installed on the tracks.
This book covers the latest advances in Communication Based Train Control (CBTC) research in on-board components locomotive messaging systems, GPS sensors, communications wayside and switching networks. It also focuses on architecture and methodology using data fusion techniques. New wireless sensor integrated modeling techniques for tracking trains in satellite visible and low satellite visible environments are discussed. With a Tunnel Surveillance Integration model, the use of optimal control is necessary to improve train control performance, considering both train–ground communication and train control.
The book begins with the background and evolution of train signaling and train control systems. It introduces the main features and architecture of CBTC systems and describes current challenging methods and successful implementations.
This introductory book is very useful for Signal & Telecommunication engineers to get them acquainted with the technology used in CBTC, and help them in implementing the system suitable for Indian Railways. As this is a new technology, the information provided in this book is generic and will be subsequently revised after gaining further experience.
Tools to learn more effectively

Saving Books

Keyword Search

Annotating Text

Listen to it instead
Information
1 Vision of Intelligent Control and Tracking Rail System: Global Evident Data
1.1 Introduction
1.2 History of Train Control System Development
1.3 Advanced Train Control System
1.3.1 Positive Train Control System
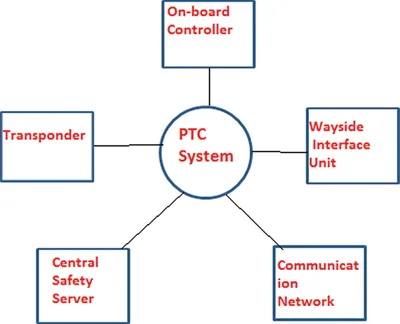
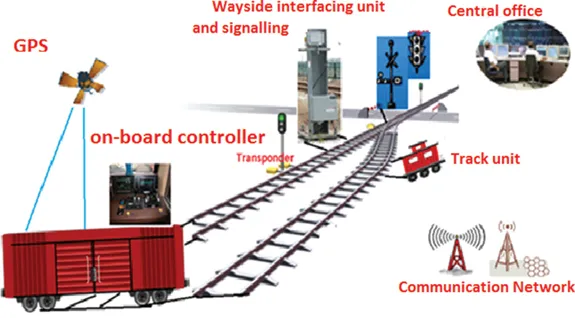
- On-board System: The onboard computer located in a train receives the information from wayside device and Central Office. The operator uses this data and takes appropriate action to limit speed and other safety concerns. If the operator does not slowdown or stop the train within 15 seconds, the onboard computer automatically applies a brake to stop train. This event must be completed before entering the next block.
- Wayside Unit: It consists of signaling equipment on-and-around the track. The equipment includes track circuit, gate, lamp, switches and much more. The devices are connected to a wayside server through an interfacing unit. This sends information from trackside equipment to the Central Office for processing and to inform the locomotive directly and act on it accordingly.
- Communication System: The communication system between locomotive, wayside device and central office depends on a bidirectional communication network. The PTC solution offers different communication interfaces such as Ethernet, 220 MHz PTC Radio, Wi-Fi and 4G Cellular. Here, onboard equipment uses 220 MHz radio or 4G cellular interface. But wayside equipment communicates with Central Office from any one of four-interface types.
- Central Office: The function of the Central Office is to store, process, and act on information it receives from the on-board locomotive computer, and wayside messaging server. The database maintains information on tracks, trains, work zones, and speed restrictions. Based on this information, the Central Office sends movement information to locomotives.
1.3.2 Communication-Based Train Control System (CBTCS)
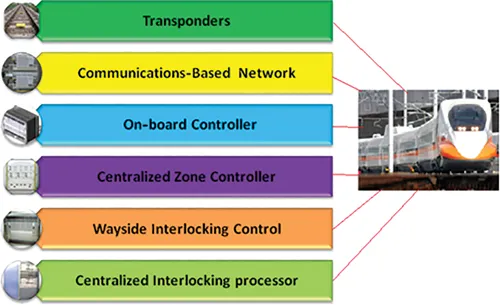
- On-board Control System (OCS): The control unit is equipped with locomotive. The main function is to control train speed such as braking, acceleration, deceleration and cruising. In CBTC, on-board control system is most intelligent compared with other traditional systems. The train position and speed data information are sent to Block Control System.
- Station Control System (SCS): The interlocking system is controlling the switch, signal and route at station. It communicates with Central unit, Block Control unit and On-board unit. Nowadays, most of the Station Control System is computer-based interlocking system.
- Block Control System (BCS): It includes a radio block system and wayside equipment along the track. It always communicates with Central office, Station and On-board Control System. The main function is to control train operation in blocks.
- Communication Network System (CNS): It connects other four systems as communication channel. It includes communication between train and wayside equipment in order to provide real-time, accurate, reliable and safe...
Table of contents
- Cover
- Half Title
- Series Page
- Title Page
- Copyright Page
- Frontmatter Page
- Table of Contents
- Preface
- Acknowledgments
- Authors
- 1 Vision of Intelligent Control and Tracking Rail System: Global Evident Data
- 2 Train Navigation Control and Information Management System
- 3 Hybrid System for Train Tracking and Monitoring Model
- 4 Locomotive Tracking in Satellite Visible and Low Satellite Visible Area
- 5 Train Trajectory Optimization Based on Di-Filter Theory
- 6 Heterogeneous Sensor Data Fusion DGPS-WSN-RFID-Based Train Tracking Model
- 7 Wireless Locomotive Real-Time Surveillance Model
- 8 Predictive Analysis of Intelligent Rail Trip Detection Service Using Machine Learning
- Further Readings
- Index
Frequently asked questions
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app