This book describes the interplay of mechanics, electronics, electrotechnics, automation and biomechanics. It provides a broad overview of mechatronics systems ranging from modeling and dimensional analysis, and an overview of magnetic, electromagnetic

eBook - ePub
Dynamics Of Mechatronics Systems: Modeling, Simulation, Control, Optimization And Experimental Investigations
Modeling, Simulation, Control, Optimization and Experimental Investigations
- 356 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Dynamics Of Mechatronics Systems: Modeling, Simulation, Control, Optimization And Experimental Investigations
Modeling, Simulation, Control, Optimization and Experimental Investigations
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Subtopic
Automation in EngineeringChapter 1
Introduction
1.1Mechatronics
The creators of curricula at technical universities have known for a long time that a good designer, apart from the skills of coding, should possess interdisciplinary knowledge. In addition to teaching mechanics, strength of materials, basics of construction and mechanical technology, many mechanical engineering faculties conducted classes in electrical engineering, electronics, automation, hydraulics and pneumatics, information technology, measuring instruments, machinery architecture, and other. The engineer educated according to this curriculum is expected to have broad knowledge and can choose the appropriate solution directly using known techniques or the knowledge of experts he had known.
In 1969, a concept name mechatronics was invented in Japan (and later distributed in the 70s) to determine the synergistic use of knowledge of the basic fields of technology. The word results from a combination of words mechanics and electronics. Authors [Xie (2003)] and [Lerner and Trigg (2005)] give definitions and descriptions of significance supplemented with graphs presenting the concept of mechatronics. Figure 1.1 exhibits one of the patterns showing the relationship between modern fields of technology which is presently observed in mechatronics.
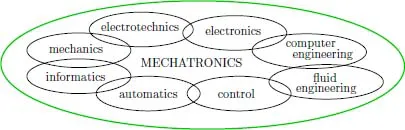
Fig. 1.1 Relationship fields in mechatronics.
One of the greatest challenges in the development of mechatronic devices and systems are, next to their variety, also progressive complexity and versatility [Scherz and Monk (2013); Budynas and Nisbett (2015); Cetinkunt (2007)]. The progress of civilization enforces researchers and engineers to search for non-coexisting solutions in various fields of science and technology [Karnopp et al. (2012); Di Paola and Cicirelli (2010)].
Noticeable lack of sufficiently well developed methods of dynamics analysis supporting interdisciplinary aspects of processes of the development of mechatronic devices and systems enhances the willingness to use an optimization theory and different techniques of numerical modeling. The numerical simulation and some related processing with measurement signals are highly correlated with advanced optimization methods. In this context, the device and system models presented in this monograph gain in importance and for many engineers should be an interesting source of information about mathematical modeling of dynamical systems, numerical experiments, experimental measurement, and various optimization problems of mechatronics.
1.2Systems
System (gr. systema – complex object) – a physical or abstract object in which reciprocal links can be distinguished. According to one of the criteria [Schmid (2002)], systems can be divided into: abstract and physical, static and dynamic, open and closed, autonomous and nonautonomous, etc.
System – an assembly of reciprocally incorporated elements fulfilling a specific function and being treated as separated from the environment for a specific purpose, i.e., descriptive, exploratory and other. For example, a technological process defines a system. The concept of a system is used practically in all areas of human life and refers to either phenomena, objects or processes in nature as well as those created by people.
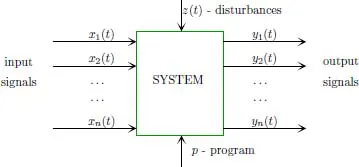
Fig. 1.2 Block diagram of system functioning.
We distinguish miscellaneous systems such as: social, political, nervous, numerical, metric, solar, radio navigation, computer, and much more. In cybernetics and exploratory systems, it is assumed that the environment influences the system through input signals, which may be targeted at interactions (control, decisions) or disturbances interferencing with the objective of the system. An important feature of real systems are their dynamical properties. The properties are the cause of the presence of the system in an equilibrium rest, in the steady state or in a transient state which tends to an equilibrium or not. If dynamical properties are not essential, the system is treated as static [Zierep (1978)]. Block diagram of a system built on the basis of that definition is shown in Fig. 1.2.
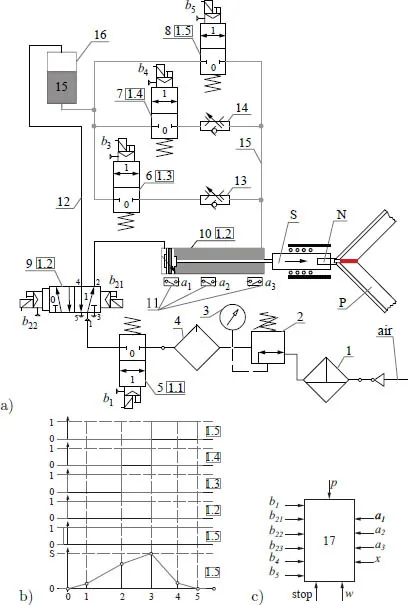
Fig. 1.3 A pneumohydraulic system of actuating control of a planer of corners of PCV windows: (a) pneumohydraulic scheme, (b) diagram of operation, (c) the controller [Lewandowski (2005)].
The pneumohydraulic system depicted in Fig. 1.3 is composed of the following parts: 1 – strainer, 2 – reducing valve, 3 – manometer, 4 – lubricator, 5-8 – monostable divide valves 2/2, 9 – bistable divide valve 5/2, 10 – pneumohydraulic actuator with mutual damping, 11 – position reed switches, 12 – air lines, 13, 14 – chock valves, 15 – oil lines, 16 – pneumohydraulic relay of pressure, 17 – PLC controller, ai – input signals, bij – output signals, x – a signal starting the cycle, w – power “on” or “off”, stop – emergency turn off.
1.3Units of Measurement
A physical quantity A is defined by a value {A} and a unit of measurement [A]:

The unit of measurement is a specific measure of the physical quantity which serves as a template for the quantitative determination of other measures by comparison of these measures by numbers. By convention, the numerical value of the reference measurement is equal to 1, thus:

In the metric system of measurement (SI), there are 7 well-defined basic units and 2 supplementary units.
Basic units include:
1)meter [m] – length,
2)ampere [A] – electric current,
3)kilogram [kg] – mass,
4)mole [mol] – amount of a substance,
5)second [s] – time,
6)candela [cd] – luminous intensity,
7)kelvin [K] – thermodynamic temperature.
Supplementary units include:
8)radian [rad] – plane angle,
9)steradian [sr] – solid angle.
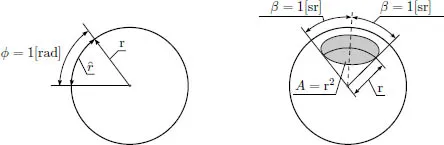
Fig. 1.4 Graphical representation of radian ϕ and steradian β.
The currently used international system of units SI was adopted in 1960 at the Ninth General Conference of Weights and Measures in Geneva. In mechanics, we use 3 basic units forming the MKS system, which are: meter [m], kilogram [kg], second [s]. The MKS measurement system is referred to as an absolute practical system of units. The abovementioned set of units is also a LMT system whose name comes from the first letters of the words: length, mass, time. The earlier absolute unit CGS system (a part of the LMT system) used in physics consists of centimeter [cm], gram [g] and second [s] (see in Table 3.1). In the basic units one finds systems of various configurations. For example, 4-component LMTI or 6-component LMTIΘJ which distinguishes length, mass, time, electric current, thermodynamic temperature and brightness [Lerner and Trigg (2005)].
Table 1.1 Abbreviations of secondary units.

Apart from the basic unit...
Table of contents
- Cover
- Halftitle
- Title
- Copyright
- Preface
- Acknowledgements
- Contents
- 1. Introduction
- 2. Model and Modeling
- 3. Magnetic and Electromagnetic Phenomena
- 4. Modeling of Piezoelectric Phenomena
- 5. Modeling of Mechanical Fluid Systems
- 6. Modeling of Electrohydraulic Servomechanisms
- 7. Atom Modeling
- 8. Maxwell’s Equations
- 9. Optimization
- 10. Fuzzy Logic in Numerical Algorithms
- 11. Tracking Control of an Electromechanical System
- 12. Numerical Modeling of a Shock Response
- 13. Control of a Multibody System Response to a Suddenly Applied Force
- Bibliography
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Dynamics Of Mechatronics Systems: Modeling, Simulation, Control, Optimization And Experimental Investigations by Jan Awrejcewicz, Donat Lewandowski;Pawe?? Olejnik in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Automation in Engineering. We have over 1.5 million books available in our catalogue for you to explore.