![]()
Chapter 1
2015 Problem 3: Artificial Muscles
Xin Yuan1*, Ruyang Sun2†, Wenli Gao3, Huijun Zhou3
1School of Chemistry and Chemical Engineering, Nanjing University
2Kuang Yaming Honors School, Nanjing University
3School of Physics, Nanjing University
In this solution, we investigate the thermally-actuated artificial muscles made from fishing lines by twist insertion. We give an explanation about the fabrication of the muscle, and illuminate the influences of several parameters during the fabrication process. Based on the properties of polymer, a model is put forward to describe the observed torsional actuation of twisted fiber. A relation between fiber’s torsional actuation and muscle’s tensile actuation is deduced, which proves that the spring-like structure of the muscle plays an important role in the thermal contraction.
1.Introduction
Attach a polymer fishing line to an electric drill and apply tension to the line. As it twists, the fibre will form tight coils in a spring-like arrangement. Apply heat to the coils to permanently fix that spring-like shape. When you apply heat again, the coil will contract. Investigate this artificial muscle.
The term “artificial muscle” is generally used to describe materials or devices that can reversibly contract, expand, or rotate within one component due to an external stimulus (such as voltage, current, pressure or temperature). The high flexibility, versatility and power-to-weight ratio of this kind of materials, compared with traditional rigid actuators, hint that they have the potential to be a highly disruptive emerging technology.1
Haines et al., first reported this kind of materials in 2014.2 They fabricated artificial muscles from commercial fishing lines, using a common electrical drill. Some investigations of relevant properties and an explanation of the actuation were also given.
In this solution, we mainly investigate the fabrication and actuation of the artificial muscles based on their work. In the fabrication part, we investigate under what condition the artificial muscle will form, and how the relevant parameters influence the structure of muscle. In the actuation part, we illuminate how the muscle contracts if heated, based on the properties of polymer and observation.
2.Fabrication of Muscles
2.1.Preliminary Experiment
In preliminary experiment, we fix one end of the fishing line, and hold the other end in hand to control the tension. We find that if we keep too large tension, the fiber will break; if we keep too little tension, it will snarl; only a suitable tension will lead to spring-like muscle. And as we change the tension while we fabricate the muscle, the muscle will have different thickness. Also, if we change the spin rate of the drill like on-off-on, we cannot obtain a homogeneous muscle. All these phenomena indicate that the applied tension and the spin rate should be kept constant during the fabrication.
2.2.Manufacture
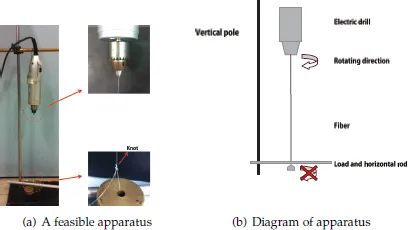
After several preliminary experiments, it can be found that constant twist insertion rate and tension inside the fiber could ensure the muscles to be uniform and homogeneous. Based on these, a feasible apparatus is designed as shown in Fig. 1: One end of the fishing line is clumped into an electric drill chunk, while the other end is tied to a suitable load. With the help of a vertical pole and a horizontal rod, the lower end of the line is constrained from rotating.
During the fabrication, as the friction between the rod and the pole could be neglected compared to the unchanged weight of the rod and load, the tension inside the fishing line could be assumed to be constant. The common electric drill provides a constant twist insertion rate (about 8000 rpm).
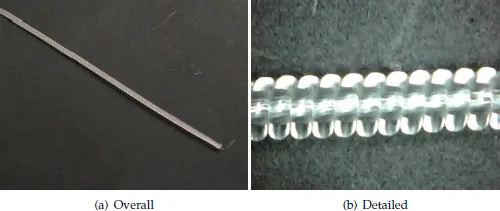
When the drill begins to work‡, it can be observed that the load is first lifted up and the line begins to coil up from the knot in the lower end. The coil grows all through the whole line quickly, leading to a notable decrease of the distance between the two ends of the line. Then we take the coiled line out, anneal the line at about 50 °C. During annealing, the coiled line will shrink with an increase of the diameter. About one minute later, the spring-like shape will be fixed permanently and an artificial muscles is obtained (Fig. 9). Actually, if we put the newly prepared coiled line aside for about several hours, it will also undergo the same procedure of line shrink and diameter increase, and finally stabilize to almost the same size and shape as those of the annealed one. This comparison indicates that annealing process expedites the relief of residual stress, which will spontaneously occur over a long time at room temperature.
Fig. 1. Apparatus.
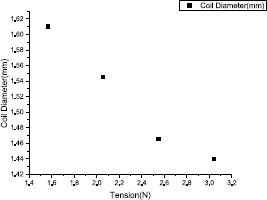
In order to find out the suitable range of load weight for our fishing line, different loads are applied to manufacture the artificial muscles. As to our sample, a nylon fiber with a diameter of 0.46 millimeters, the suitable load range is from about 160 grams to 310 grams.
Within the range, different weights result in muscles of different diameters. The less load results in larger diameter, which means a higher spring index (the ratio of muscle diameter to the fiber diameter), and larger load results in smaller diameter. The data is shown in Fig. 3.
Fig. 2. Fabricated artificial muscle.
Fig. 3. Relation between the applied load and corresponding coil diameter.
2.3.Analysis
Twist insertion directly leads to torsion inside the fishing line, which helps the muscle maintain its helical structure under tension. As shown in Fig. 4(a), we take a cross section A to divide the fiber into two parts and take a look at the upper one. From mechanics of materials, we know there is an internal force Fa applied on the cross section, equal to the tension F applied to the upper part but directing to the contrary. Then the two for...