The discrete vision of mechanics is based on the founding ideas of Galileo and the principles of relativity and equivalence, which postulate the equality between gravitational mass and inertial mass. To these principles are added the Hodge–Helmholtz decomposition, the principle of accumulation of constraints and the hypothesis of the duality of physical actions.
These principles make it possible to establish the equation of motion based on the conservation of acceleration considered as an absolute quantity in a local frame of reference, in the form of a sum of the gradient of the scalar potential and the curl of the vector potential. These potentials, which represent the constraints of compression and rotation, are updated from the discrete operators.
Discrete Mechanics: Concepts and Applications shows that this equation of discrete motion is representative of the compressible or incompressible flows of viscous or perfect fluids, the state of stress in an elastic solid or complex fluid and the propagation of nonlinear waves.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
This chapter is dedicated to the foundations of discrete mechanics. The notion of space is defined directly as a set of topological elements: edges and surfaces. These geometric elements exist at every scale and cannot be reduced to a point like in a continuum; as a result, we must abandon the concept of local differentiation, as well as inertial and non-inertial frames of reference. Some of the classical principles of physics can be kept, such as the weak equivalence principle and the principle of relativity, and some new physical principles are encountered for the first time, such as Hodge–Helmholtz decomposition. We also require new axioms and hypotheses: the accumulation of stresses and the duality of mechanical actions of all kinds.
1.1. Definitions of discrete mechanics
1.1.1. Notion of discrete space–time
A method of positioning ourselves within space and time is essential if we wish to represent the universe around us, whether the universe of our daily lives, or the wider universe governed by the laws of general relativity. Positioning systems (GPS and Galileo) have become indispensable tools for many human activities such as transportation, well-drilling and so on. But in fact, to move toward a nearby target, we do not need to know our position exactly with respect to some absolute reference; we simply need to know the path to our target. The various theories of mechanics (Newtonian, quantum, continuum, relativistic, etc.) do not contradict each other – quite the opposite – but the connections between them have not yet been definitively established. Each theory of mechanics only describes a part of reality. The concepts, analysis tools and hypotheses of each theory vary. Ultimately, a unified theory of mechanics might not be strictly necessary.
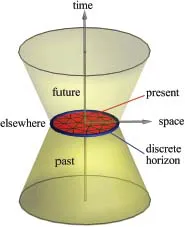
The theory of discrete mechanics presented here assumes that there exists a time, the present, that describes the state of a physical system instantaneously. Although this image of the present exists as such, an observer located within space can only perceive its environment at later moments in time, since waves (light, sound, tidal waves) travel at finite velocity. The present can, therefore, only be perceived by an exterior observer in the form of a mathematical model that provide an instantaneous description of every phenomenon in the physical system.
Figure 1.1.Light cone in space–time. For a color version of this figure, see www.iste.co.uk/caltagirone/mechanics.zip
Figure 1.1 shows the configuration of space–time in discrete mechanics; this model is borrowed from cosmology, where the present only makes sense for events unfolding at the origin. Any event that can influence or be influenced by an event unfolding at the origin is contained in the two cones whose summits are joined at the origin: the lower cone, which represents the past, and the upper cone, which represents the future. This light cone defines a so-called causal structure. For example, since the distance between the Earth and the Sun is large, we only receive light from the Sun 8 min after it was emitted. Any light signal emitted from the Earth would take just as long to reach the Sun. Events that occur during this period of time cannot be perceived by an observer; these events are said to be located elsewhere. In cosmology, the displacement
of a point in space–time is represented by the four-vector (c dt, dx), and the present is restricted to the origin. In both discrete and continuum mechanics, the present unites all elements within a single causal structure; in Figure 1.1, the boundary of this structure is a circle, which we shall call the discrete horizon. Every event in this space is linked by cause and effect, the radius of the circle rh is independent of time and every event within the circle is known instantaneously. Even if a specific observer located at some point of this space cannot directly perceive every event unfolding in the present instantaneously, the instantaneous field of all problem variables exists and can be represented by a mathematical model. Time is assumed to unfold linearly.
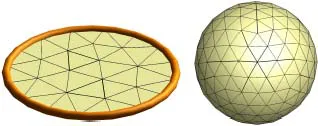
Figure 1.2 shows two spaces. The first has a finite horizon as its boundary, and the second is a sphere without a boundary but which is nonetheless finite; in both cases, all events unfolding on these surfaces are connected by the propagation of various types of waves through space. On the space with a boundary, events will necessarily be influenced by boundary conditions, which will be defined later. On the sphere, interactions will cumulate as the system evolves over time.
Figure 1.2.Space with a discrete horizon as a boundary (left) and a sphere without a boundary but which is nonetheless finite (right)
Thus, the discrete horizon defines a space on which separate phenomena can be described by a mathematical model at the same moment in time. For example, atmospheric models give an image of the present time and can be used to predict the weather over the next few days. Neglecting absorpti...
Table of contents
Cover
Table of Contents
Preface
Introduction
List of Symbols
1 Fundamental Principles of Discrete Mechanics
2 Conservation of Acceleration
3 Conservation of Mass, Flux and Energy
4 Properties of the Discrete Formulation
5 Two-Phase Flows, Capillarity and Wetting
6 Stresses and Strains in Solids
7 Multiphysical Extensions
References
Index
End User License Agreement
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Discrete Mechanics by Jean-Paul Caltagirone in PDF and/or ePUB format, as well as other popular books in Mathematics & Mathematical Analysis. We have over one million books available in our catalogue for you to explore.