Fault tree analysis is an important technique in determining the safety and dependability of complex systems. Fault trees are used as a major tool in the study of system safety as well as in reliability and availability studies. The basic methods – construction, logical analysis, probability evaluation and influence study – are described in this book. The following extensions of fault trees, non-coherent fault trees, fault trees with delay and multi-performance fault trees, are also explained. Traditional algorithms for fault tree analysis are presented, as well as more recent algorithms based on binary decision diagrams (BDD).
Foire aux questions
Comment puis-je résilier mon abonnement ?
Il vous suffit de vous rendre dans la section compte dans paramètres et de cliquer sur « Résilier l’abonnement ». C’est aussi simple que cela ! Une fois que vous aurez résilié votre abonnement, il restera actif pour le reste de la période pour laquelle vous avez payé. Découvrez-en plus ici.
Puis-je / comment puis-je télécharger des livres ?
Pour le moment, tous nos livres en format ePub adaptés aux mobiles peuvent être téléchargés via l’application. La plupart de nos PDF sont également disponibles en téléchargement et les autres seront téléchargeables très prochainement. Découvrez-en plus ici.
Quelle est la différence entre les formules tarifaires ?
Les deux abonnements vous donnent un accès complet à la bibliothèque et à toutes les fonctionnalités de Perlego. Les seules différences sont les tarifs ainsi que la période d’abonnement : avec l’abonnement annuel, vous économiserez environ 30 % par rapport à 12 mois d’abonnement mensuel.
Qu’est-ce que Perlego ?
Nous sommes un service d’abonnement à des ouvrages universitaires en ligne, où vous pouvez accéder à toute une bibliothèque pour un prix inférieur à celui d’un seul livre par mois. Avec plus d’un million de livres sur plus de 1 000 sujets, nous avons ce qu’il vous faut ! Découvrez-en plus ici.
Prenez-vous en charge la synthèse vocale ?
Recherchez le symbole Écouter sur votre prochain livre pour voir si vous pouvez l’écouter. L’outil Écouter lit le texte à haute voix pour vous, en surlignant le passage qui est en cours de lecture. Vous pouvez le mettre sur pause, l’accélérer ou le ralentir. Découvrez-en plus ici.
Est-ce que Fault Trees est un PDF/ePUB en ligne ?
Oui, vous pouvez accéder à Fault Trees par Nikolaos Limnios en format PDF et/ou ePUB ainsi qu’à d’autres livres populaires dans Tecnología e ingeniería et Ingeniería eléctrica y telecomunicaciones. Nous disposons de plus d’un million d’ouvrages à découvrir dans notre catalogue.
1.1.1 Function of distribution and density of failure
We will study here the stochastic behaviour of single-component systems being subjected to failures (breakdowns) by observing them over a period of time. Let us simplify things by assuming that the system is put to work at the instant t = 0 for the first time and that it presents a single mode of failure.
The component, starting a lifetime period at the instant t = 0, is functioning for a certain period of time X1 (random) at the end of which it breaks down. It remains in this state for a period of time Y1 (random) during its replacement (or repair) and, at the end of this time, the component is again put to work and so on. In this case, the system is said to be repairable. In the contrary case, that is to say, when the component breaks down and continues to remain in this state, the system is said to be non-repairable.
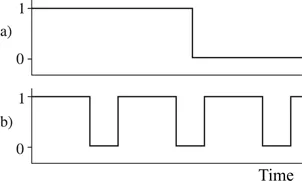
It is possible to present a graphic description of the behavior of the above- described system in different ways, the phase diagram being the most common.
Let X be a random variable (r.v.) representing the lifetime of the system with F, its cumulative distribution function (c.d.f.):
Figure 1.1Phase diagrams: (a) non-repairable system and (b) repairable system 1: state of good functioning 0: state of breakdown
If F is absolutely continuous, the random variable X has a probability density function (p.d.f.) f and can be written as:
Regarding the probability evaluation of fault trees, we always have to make the distinction between the occurrence or arrival of an event and its existence at the time t. Let us consider, for example, that the f.r. F of the duration of life of a component has an p.d.f. f. The assertion “the occurrence of the failure of the component at the time t” means that the failure took place within the time interval (t, t +
t], where Δt → 0; as a result, its probability is given by: f(t)
t + o(
t). On the other hand, the assertion “existence of the failure at the time t” means that the failure took place at the time x ≤ t and its probab...
Table des matières
Cover
Titlepage
Copyright
Introduction
Chapter 1: Single-Component Systems
Chapter 2: Multi-Component Systems
Chapter 3: Construction of Fault Trees
Chapter 4: Minimal Sets
Chapter 5: Probabilistic Assessment
Chapter 6: Influence Assessment
Chapter 7: Modules – Phases – Common Modes
Chapter 8: Extensions: Non-Coherent, Delay and Multistate Fault Trees
Chapter 9: Binary Decision Diagrams
Chapter 10: Stochastic Simulation of Fault Trees
Exercises
Appendices
Main Notations
Bibliography
Index
Normes de citation pour Fault Trees
APA 6 Citation
Limnios, N. (2013). Fault Trees (1st ed.). Wiley. Retrieved from https://www.perlego.com/book/1008633/fault-trees-pdf (Original work published 2013)