Fundamentals of Robotics presents the basic concepts of robots to engineering and technology students and to practicing engineers who want to grasp the fundamentals in the growing field of robotics.
- 448 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Fundamentals of Robotics
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1 Basic Components of Robot Arms
1.1 BASIC ARM TYPES
The identification of the various kinematic arrangements used in industrial robots is useful for manufacturers, users, and researchers. The working volume and dexterity, for example, of a robot are determined by the kinematic arrangements. From the user's point of view, a preliminary determination of the performance of a robot in the work environment based solely on geometry is possible by examination of the linkage type forming the structure of the robot.
Manipulators are typically located relative to ground by either a fixed base or a moving base. The first three links of the manipulator collectively form the manipulator arm. This arm is used for global positioning of the end of the manipulator within the work envelope. The hand is composed of the other links (up to three) and is used to define the orientation of the end of the manipulator. The hand also provides fine local positioning of the end of the manipulator. Detailed treatment of the hands and grippers used in manipulators can be found in Chapter 2. The present chapter discusses various arm types and other components of robot setups.
Two of the three types of connecting elements with one degree of freedom that can be used for connecting links in a robot are the prismatic and revolute pairs. The prismatic or sliding pair allows pure translation of one link with respect to another. The revolute or rotation pair provides pure rotation of one link on another.
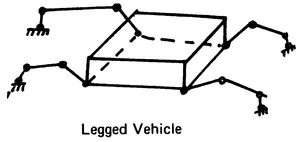
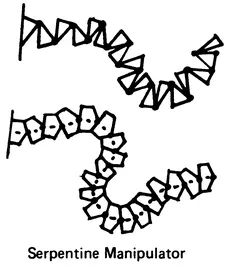
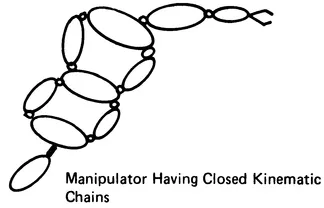
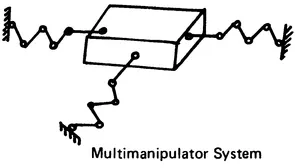
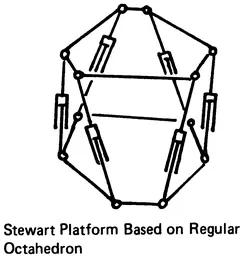
The structural arrangement of robot linkage systems (Figure 1.1) includes:
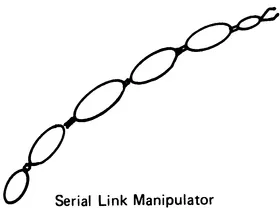
FIGURE 1.1 Types of robotic mechanisms.
- Robot manipulators with simple serial kinematic chains
- Robot manipulators with tree structures
- Robot manipulators containing closed kinematic chains
- Legged locomotory vehicles
- Multimanipulator systems and dextrous manipulator grippers
- Parallel connection arrangements
- Multisegmented serpentine designs
Serial link robots (Figures 1.2 to 1.9) may be classified according to type and sequence of the kinematic arrangements of links with prismatic (P) and revolute (R) joints in four main categories:
- Cartesian (P1P2P3)
- Cylindrical (R3P2P3)
- Spherical (R1R2P3)
- Anthropomorphic (R1R2R3)
A cartesian robot, which is also called rectangular or rectilinear, has three translation joints. It generates a rectangular workspace with the three basic motions: base travel (P1), reach (P2) and elevation (P3). Some typical industrial robots of this classification are:
| Source | Model | Drive system |
|---|---|---|
| Advanced Robotics (USA) | Cyro 750 | Electric DC |
| Anorad (USA) | Anorobot | Electric DC |
| FATA European Group (Italy) | Junior | Electric |
| Senior | Electric | |
| Hitachi (Japan) | Mr: Aros | Hydraulic |
| Matsushita Ind. (Japan) | RW2000 | Electric AC |
| Mitsubishi Heavy Ind. (Japan) | Robitus RC-RH | Hydraulic |
| Mouldmation (UK) | Mouldemate 1200 | Pneumatic |
| Oy W Roseniew (Finland) | Rb 17, 19 | Hydraulic |
| Renault (France) | G80 | Hydraulic |
| S.A. Distribel Robotechnic (Belgium) | Phoenix 3512S | Electric stepper |
| Volkswagenwerke AG (West Germany) | R100 | Electric DC |
| VFW (West Germany) | E440 | Electric DC |
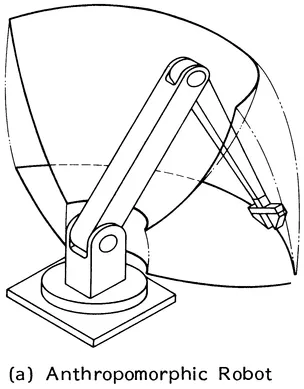
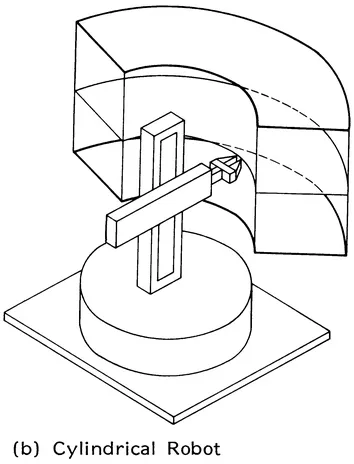
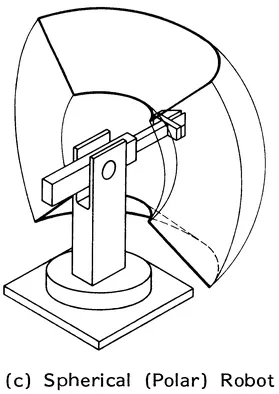
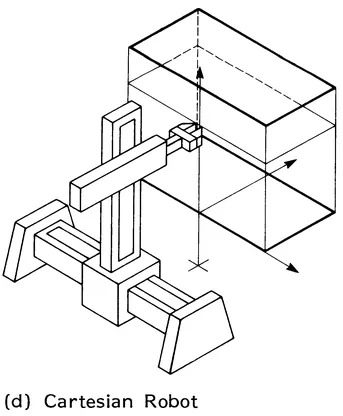
FIGURE 1.2 Basic configuration of serial robot arms and the associated workspace.
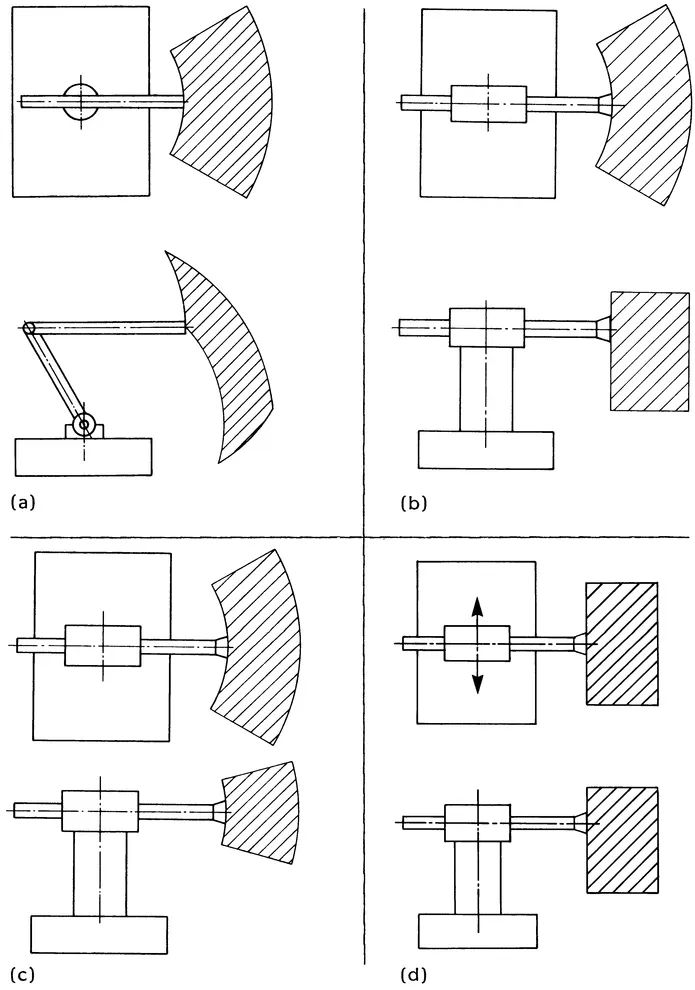
FIGURE 1.3 Orthographic projections of the workspace of tha basic robot configurations. (a) Anthropomorphic robot, (b) Cylindrical robot, (c) Polar robot, (d) Rectangular robot.
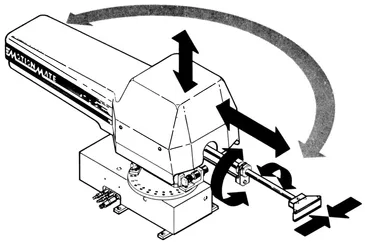
FIGURE 1.4 Configuration of a robot with cylindrical coordinate arm motions. (A) Base rotates with a motion range of 180°, which is adjustable in increments of 15°; (B) lift of 3 in.; (C) extends to 12 in.; (D) wrist rotates 90° or 180°; (E) grasp. (Courtesy of Sehrader-Bellows, a Division of Scovil.)
The cylindrical robot (Figure 1.4) has its basic motions in cylindrical coordinates: base rotation (R1), reach (R2), and elevation (P3). Examples of cylindrical robots are:
| Source | Model | Drive system |
|---|---|---|
| FAB Bilsing (Germany) | High speed | Hydraulic |
| Fanuc (Japan) | MO, Ml, M2 | Electric |
| Jobs (Italy) | JOBOT 10 | Electric |
| Kayaba Ind. (Japan) | KMR 200 | Hydraulic |
| KMR 300 | Hydraulic | |
| Lamberton Robotics (UK) | AA 150 | Electric |
| AA 700 | Electric | |
| AA 13... |
Table of contents
- Cover
- Half Title
- Series Page
- Title Page
- Copyright Page
- Preface
- Contents
- Introduction
- 1 Basic Components of Robot Arms
- 2 End Effectors
- 3 End-of-Arm Tooling and Workpiece Positioners
- 4 End-of-Arm Sensors
- 5 Robot Controllers
- 6 Nontextual Programming
- 7 Textual Programming
- 8 Robot Vision Systems
- 9 Robot Applications
- 10 Geometry of the Workspace
- 11 Kinematics and Trajectory Generation
- 12 Dynamics and Control
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Fundamentals of Robotics by David Ardayfio in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Biomedical Science. We have over 1.5 million books available in our catalogue for you to explore.